网络
源码
centos
git
语音识别
笔记
.pdf预览
node
二分法
扩散模型
kubernetes
大学生心理健康咨询系统
开发工具
图像像素点测量温度
浏览器选择建议
自由工作
PIC
完数
语音小夜灯IC
清华大学
三维重建
2024/4/11 18:15:47
openmvg2.0编译与使用
目录写在前面获取代码github网盘编译使用稠密重建参考完写在前面
1、openmvg是一个用于实现structure from motion的开源库,实现了完整的sfm pipeline,并有说明文档: https://openmvg.readthedocs.io/en/latest/ 2、本文内容 openmvg v2.0的编译 openmv…
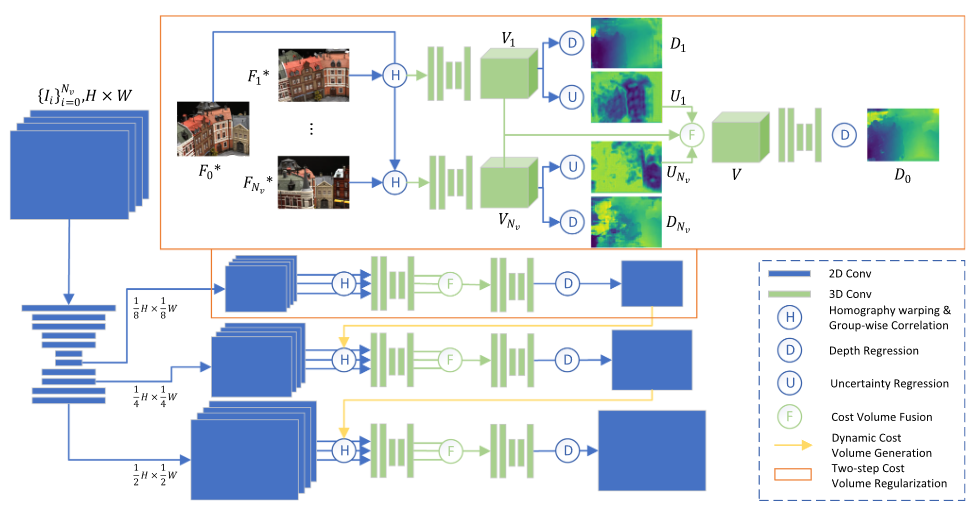
【论文精读3】MVSNet系列论文详解-P-MVSNet
P-MVSNet全名为“P-MVSNet: Learning Patch-wise Matching Confidence Aggregation for Multi-View Stereo”,名字当中反映了论文的核心模块即基于学习方法的分块匹配置信聚合模块,乍一看有点难理解,但看完本文肯定很清楚啦。 本文是MVSNet系…

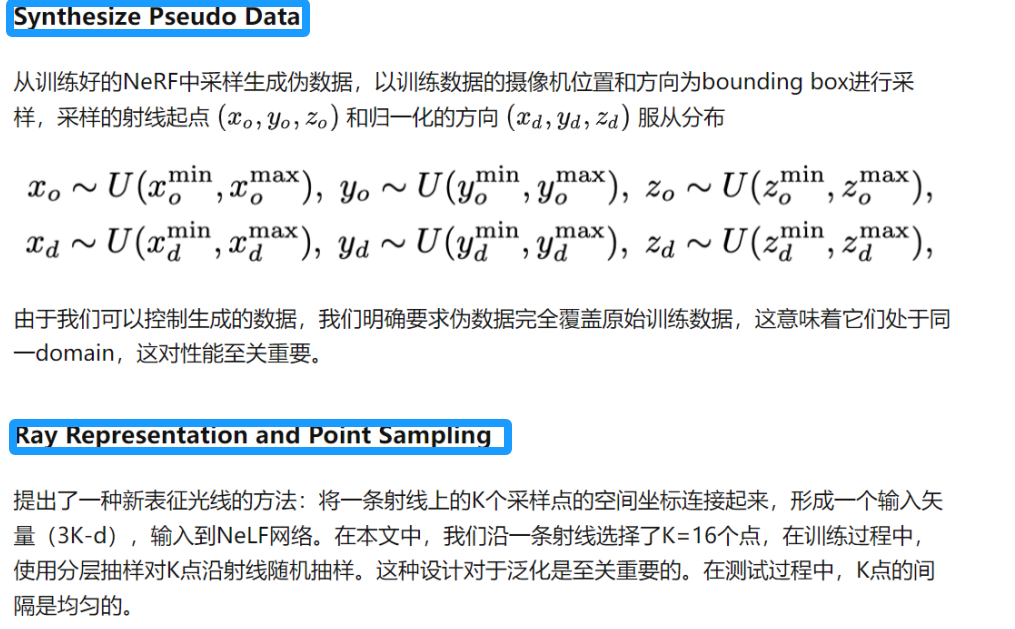
NeRF——静态的快速扫描方法
NeRF(Neural Radiance Fields)是一种用于三维场景重建和渲染的深度学习方法,它利用神经网络来表示场景的连续体积密度和颜色信息。通过从一组稀疏的二维图像中重建高质量的三维场景,并能从任意视角生成逼真的图像,NeRF…
CV计算机视觉每日开源代码Paper with code速览-2023.11.2
精华置顶 墙裂推荐!小白如何1个月系统学习CV核心知识:链接 点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【目标检测】Re-Scoring Using Image-Language Similarit…

Paper--3d reconstruction:Open Source Structure-from-Motion for Aerial Video
目录三维重建系列文章写在前面AbstractIntroduction2 Related Work3 System Architecture4 Algorithms4.1. Feature Tracking and Loop Closure4.2. Hierarchical Sparse Bundle Adjustment完三维重建系列文章
Paper–3d reconstruction:Photo Tourism: Exploring …

openmvg1.6编译与使用
目录写在前面获取代码v1.6编译修改代码编译DebugReleasev1.6使用1、命令行逐步执行2、用python稠密重建参考完写在前面
1、openmvg是一个用于实现structure from motion的开源库,实现了完整的sfm pipeline,并有说明文档: https://openmvg.readthedocs.i…
用3D高斯泼溅(3DGS)重建自己的数据
几乎可以下结论:3D Gaussian Splatting(3DGS)技术的出现,宣告了NeRF时代的结束。犹如transformer当年对CNN的打击。 一个集高渲染质量、分钟级重建速度、实时渲染速度为一身的三维重建算法3DGS,毫无疑问开创了一个新的时代。本文不对3DGS的原…

单图像3D重建AI算法综述【2023】
计算机视觉是人工智能的一个快速发展的领域,特别是在 3D 领域。 本概述将考虑一个应用任务:2D 和 3D 环境之间的转换。 在线工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编…
用重建大师生成osgb数据,没有xml文件,怎么查看这个数据是什么坐标系?
答:没有xml文件确实看不到模型的坐标信息,因为是只写进xml里面的,可以在建模软件中查看相关工程的设置。
重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,PO…

【三维重建】【SLAM】SplaTAM:基于3D高斯的密集RGB-D SLAM(CVPR 2024)
题目:SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM 地址:spla-tam.github.io 机构:CMU(卡内基梅隆大学)、MIT(美国麻省理工) 总结:SplaTAM,一个新…

open3d可视化对应点连线
目录写在前面准备修改源码Registration.hRegistration.cpp使用编译与使用参考完写在前面
1、本文内容 open3d点云配准时,添加点对连线,用于可视化当前的correspondences 2、平台 windows10, visual studio 2019 3、转载请注明出处: https://…

NeRF神经辐射场渲染过程详解,三维重建渲染过程基本原理_光线采样sample_pdf()和光线渲染render_rays ()代码详解
目录
1 神经辐射场
1.1 基本原理
1.2 基本流程 1.3 数学解释
2 三维场景图像渲染详解
2.1射线采样
2.2 NeRF 模型预测
2.3 体积渲染
3 采样与渲染代码详解 (rending.py)
3.1 神经体积渲染代码解析
3.2 sample_pdf 函数
3.3 render_rays 函数 …

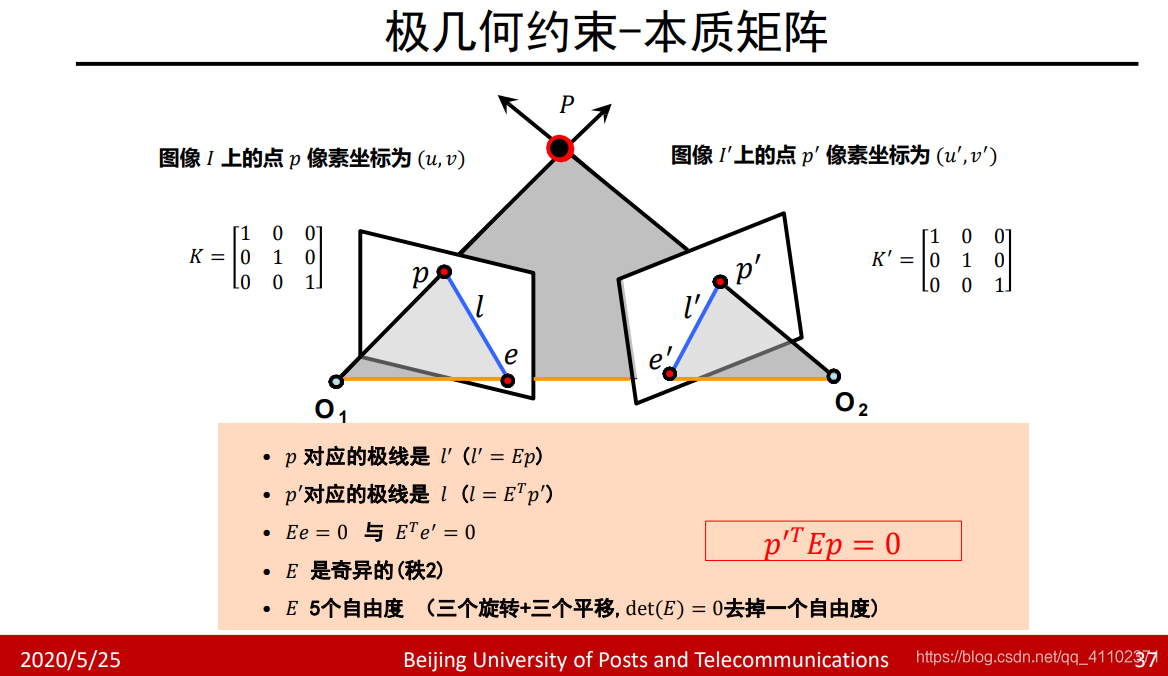
计算机视觉之三维重建(4)---三维重建基础与极几何
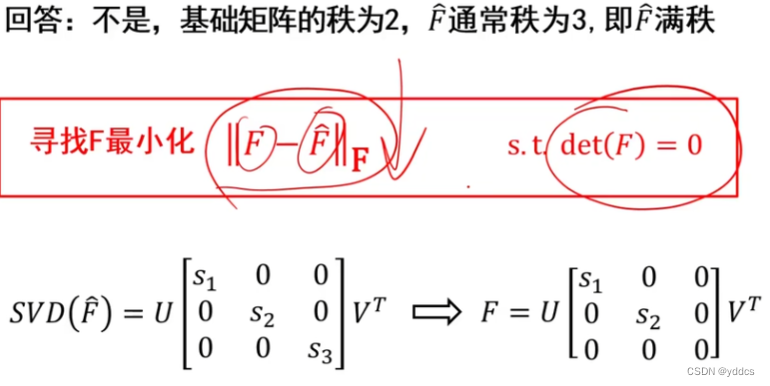
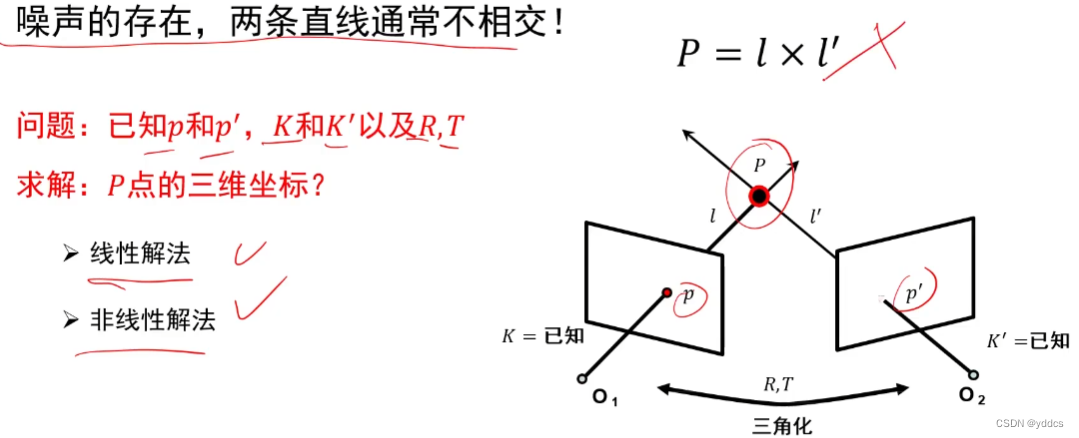
文章目录 一、三维重建基础1.1 问题引入1.2 线性解法1.3 非线性解法1.4 多视图几何的关键问题 二、极几何与基础矩阵2.1 极几何2.2 极几何特例2.3 本质矩阵2.4 本质矩阵的性质2.5 基础矩阵2.6 基础矩阵的性质 三、基础矩阵估计四、单应矩阵 一、三维重建基础
1.1 问题引入 1. …

Paper--3d reconstruction:Photo Tourism: Exploring Photo Collections in 3D
目录三维重建系列文章写在前面4 Reconstructing Cameras and Sparse Geometry4.1 Keypoint detection and matching4.2 Structure from motionfuture work附录参考完三维重建系列文章
Paper–3d reconstruction:Photo Tourism: Exploring Photo Collections in 3D …
用DasViewer浏览模型时可以移动模型的中心点吗?
按住鼠标中键,就正常平移模型了。
DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,也能流畅的加载较大规模实景三维模型,提供方便快捷的数据浏览操作。
DasViewer下载地址:…
【AI视野·今日CV 计算机视觉论文速览 第274期】Tue, 24 Oct 2023
AI视野今日CS.CV 计算机视觉论文速览 Tue, 24 Oct 2023 Totally 138 papers 👉上期速览✈更多精彩请移步主页 Interesting:
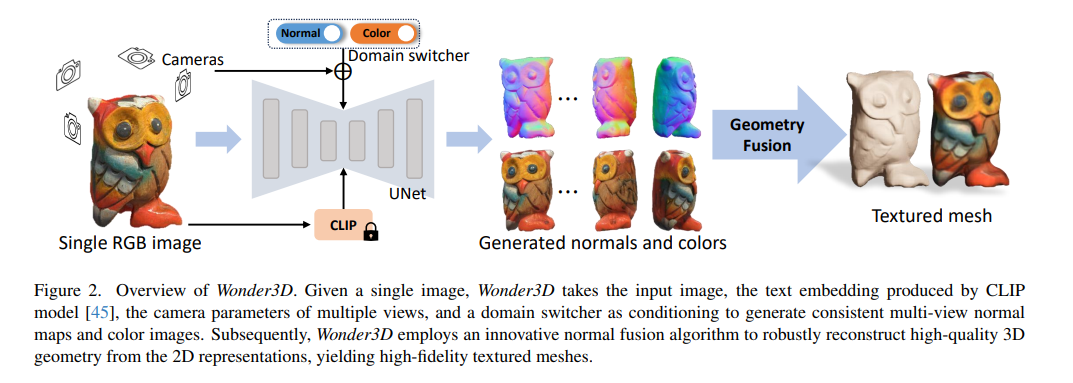
📚Wonder3D, 基于交叉扩散模型的单图像三维形状生成。(from 香港大学) website:https://www.xxlong.site/Wonder3D/ Daily Co…
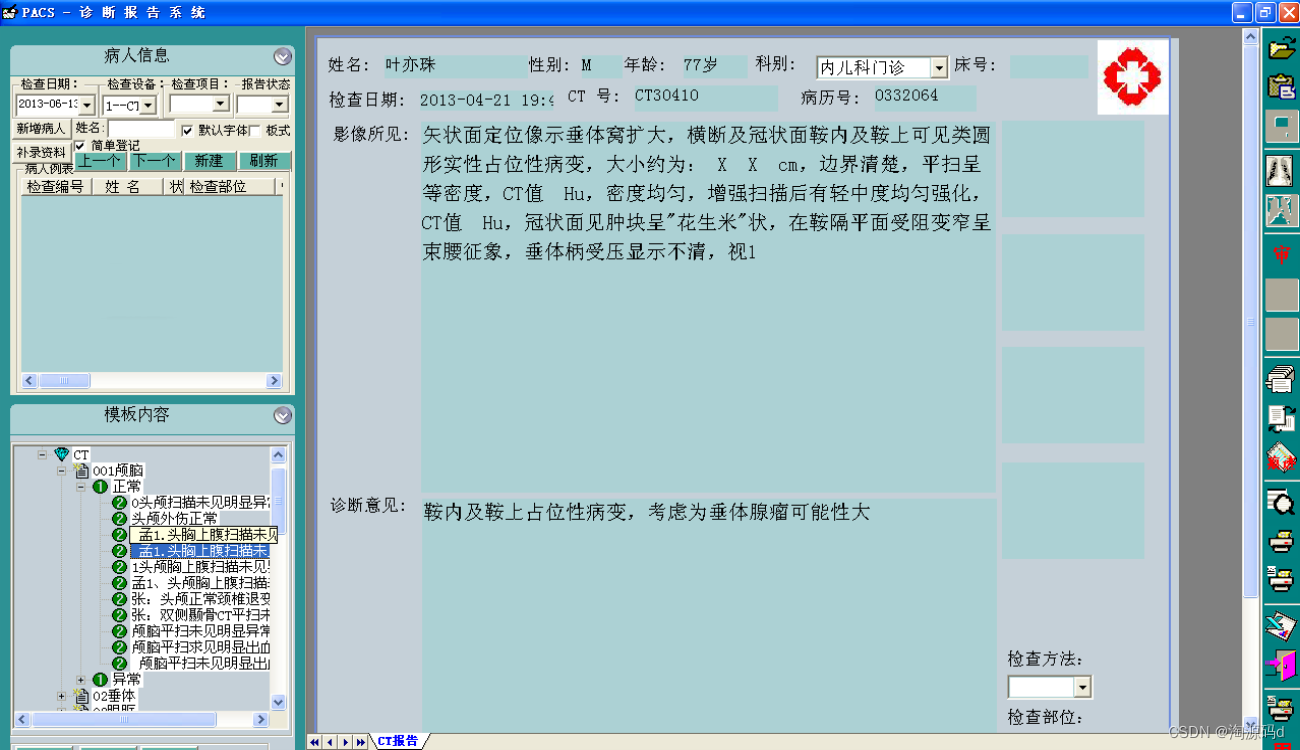
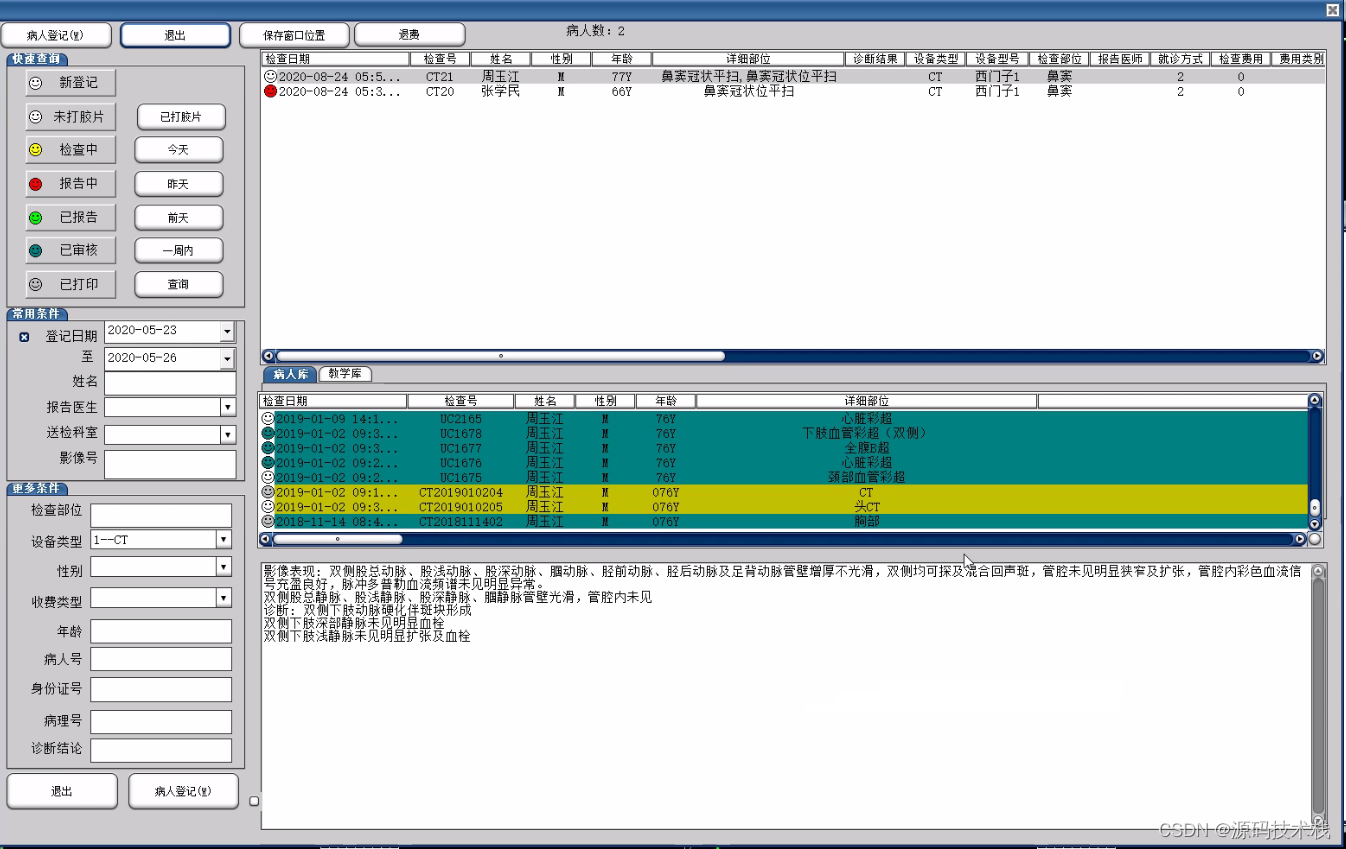
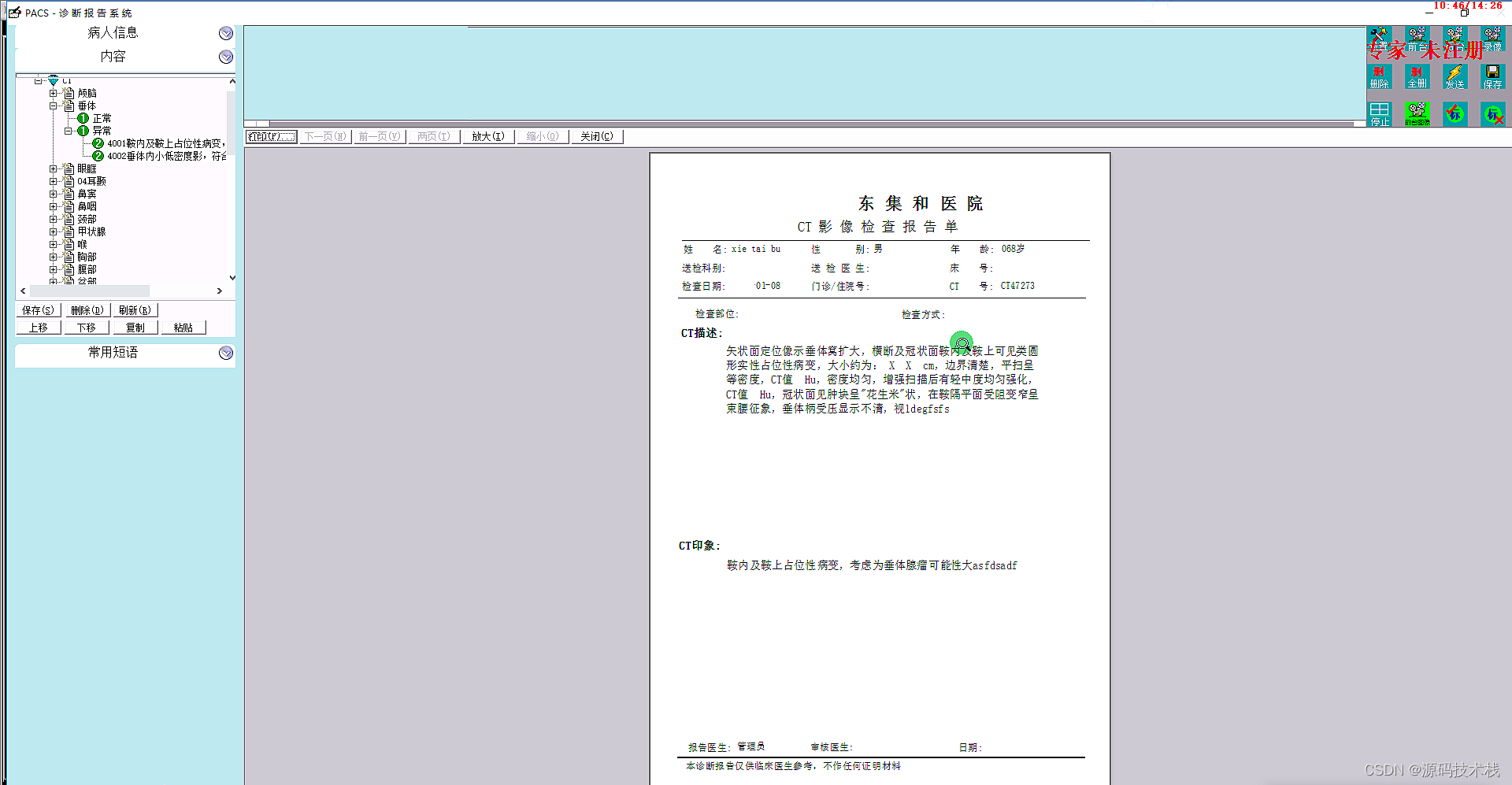
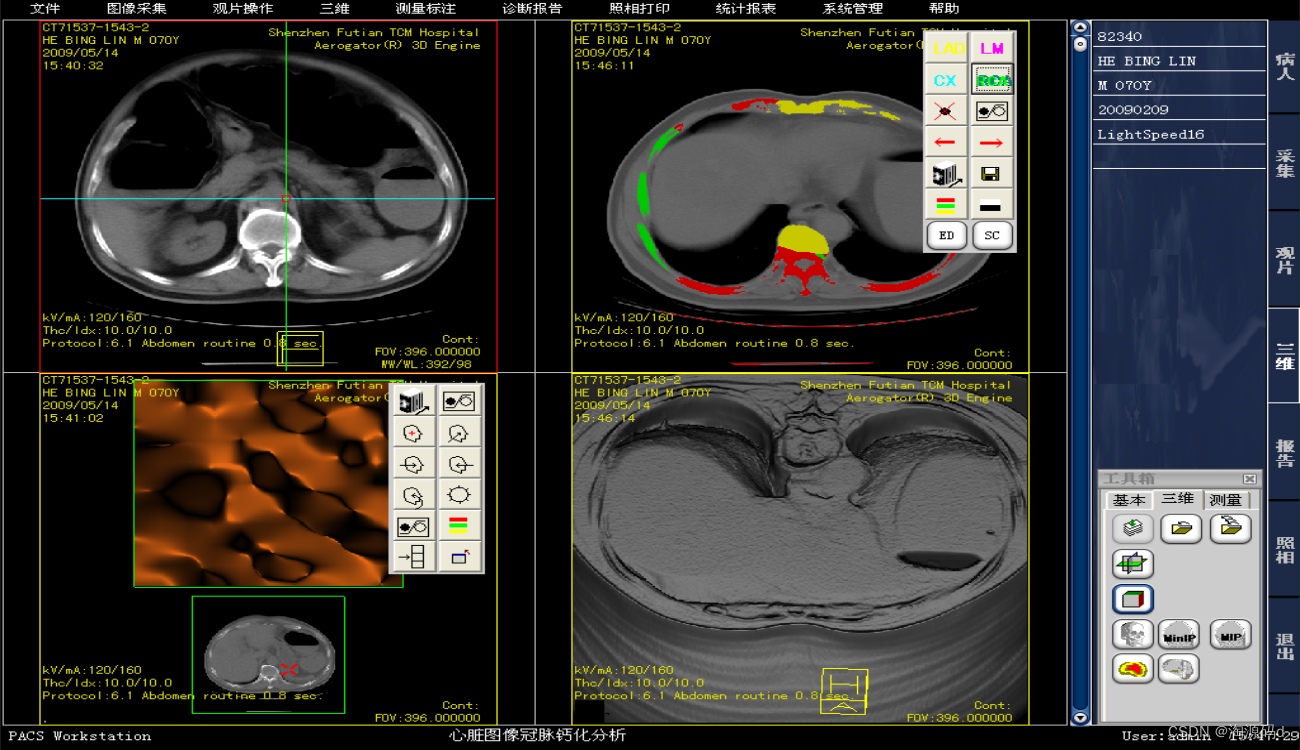
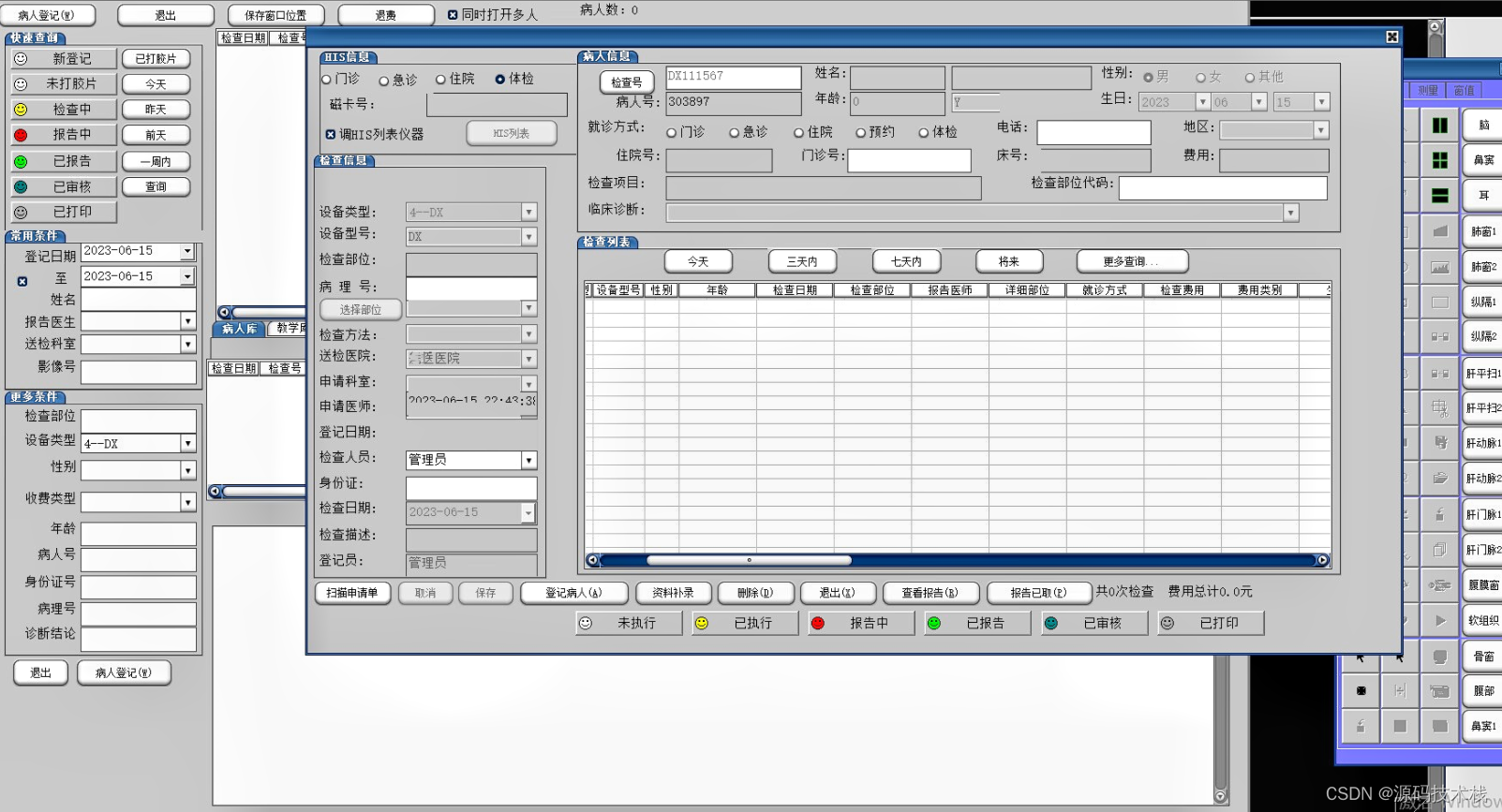
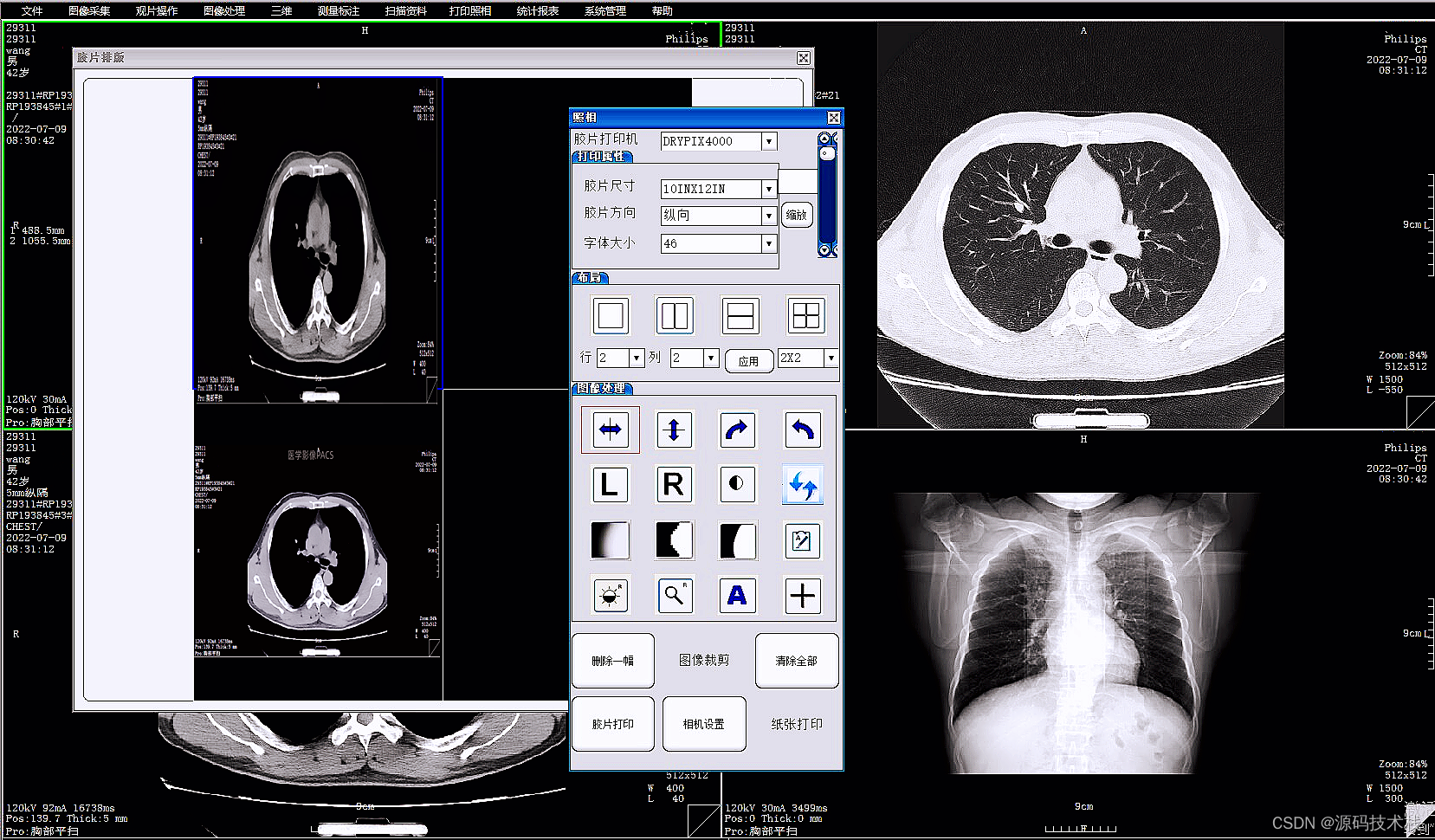
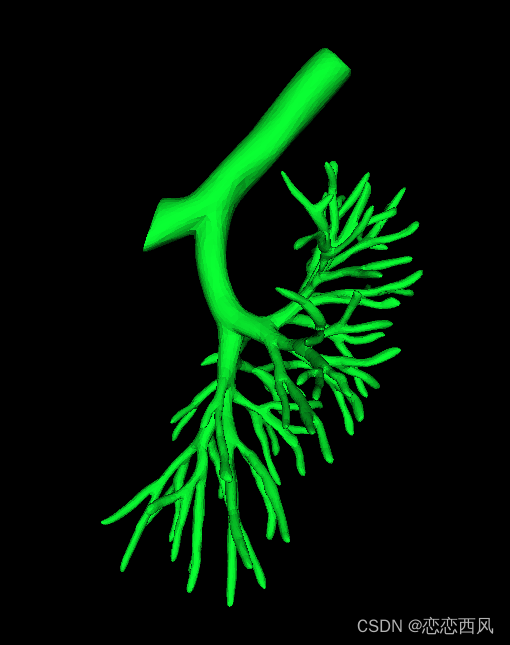
PACS医学影像信息化数字平台源码
PACS系统对医院影像科意义重大,将业务量巨大的影像检验流程依托于信息化技术,对于进行信息化建设的医院而言,是十分必要的。 PACS系统源码,集成三维影像后处理功能,包括三维多平面重建、三维容积重建、三维表面重建、三…

RC-MVSNet:无监督的多视角立体视觉与神经渲染--论文笔记(2022年)
RC-MVSNet:无监督的多视角立体视觉与神经渲染--论文笔记(2022年) 摘要1 引言2 相关工作2.1 基于监督的MVS2.2 无监督和自监督MVS2.3 多视图神经渲染 3 实现方法3.1 无监督的MVS网络 Chang, D. et al. (2022). RC-MVSNet: Unsupervised Multi-…
【三维重建】MobileR2L:轻量化移动端三维重建(CVPR2023)
文章目录 摘要一、Introduction简介二、具体方法1.什么是NeRF2.什么是R2L3. MobileR2L的 overview3. MobileR2L的 网络结构 三、实验1.数据集2.实现细节 四、Limitation and ConclusionNerf和NeRf差别 摘要
问题: 由于体积渲染的过程,NeRF的推理速度非常…

圖像解析度的估計與mve代碼研讀
圖像解析度的估計與mve代碼研讀前言圖像解析度的估計footPrint及footPrintScaled前言
本篇介紹由相機焦距fff及三維點深度zcz_czc估計解析度(分辨率)的方法,並與simonfuhrmann/mve裡的代碼做對照。
圖像解析度的估計
設rrr為空間中一個球體的直徑,如…
学习笔记之——3D Gaussian SLAM,SplaTAM配置(Linux)与源码解读
SplaTAM全称是《SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM》,是第一个(也是目前唯一一个)开源的用3D Gaussian Splatting(3DGS)来做SLAM的工作。
在下面博客中,已经对3DGS进行了…
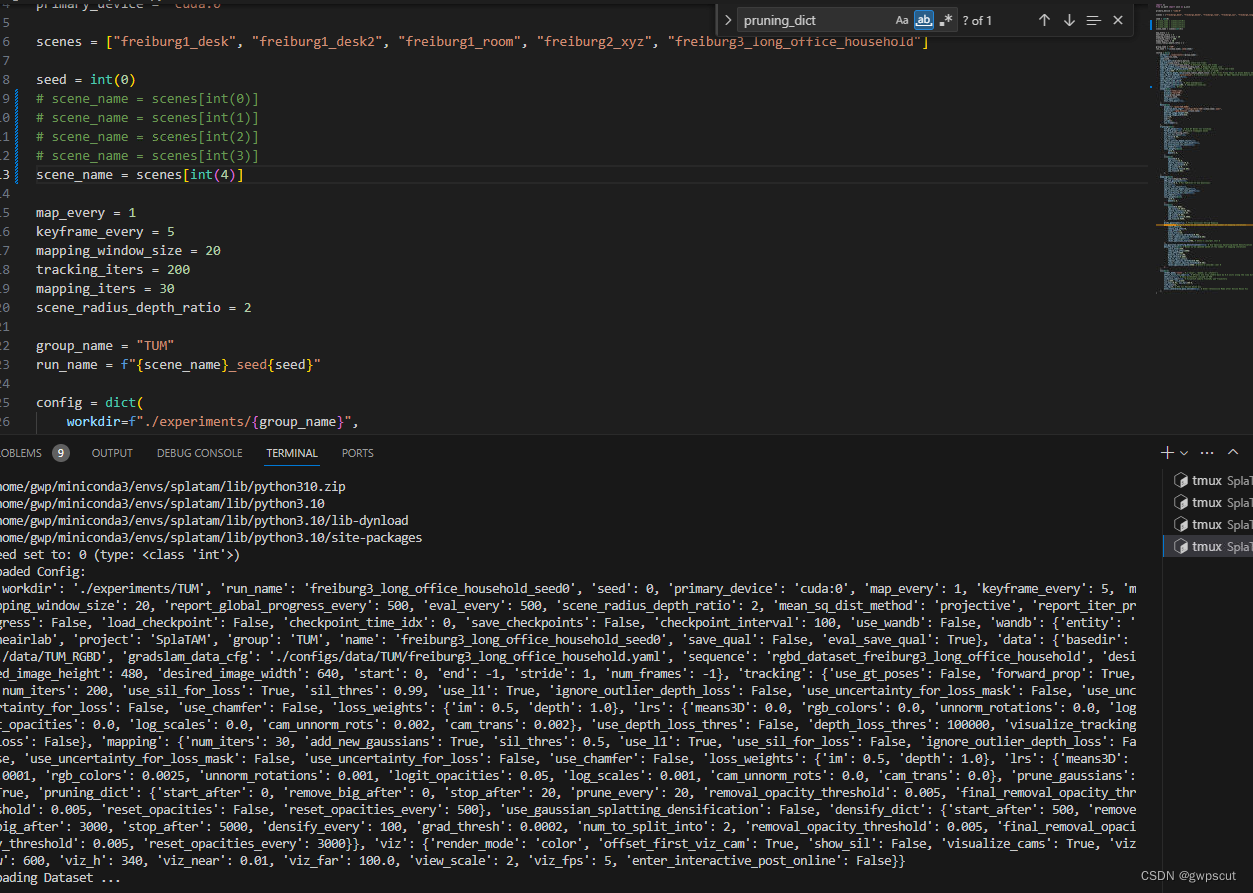
实验笔记之——基于TUM-RGBD数据集的SplaTAM测试
之前博客对SplaTAM进行了配置,并对其源码进行解读。
学习笔记之——3D Gaussian SLAM,SplaTAM配置(Linux)与源码解读-CSDN博客SplaTAM全称是《SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM》,…

达到国际领先水平!“基于实景三维的土地综合整治监管与成效评估技术应用”技术成果通过专家组评价
本文转自中国地理产业协会 评价会现场 8月16日,受广西自然资源产品质量检验中心委托,广西人工智能学会在南宁市采用线上线下结合的形式,组织召开了“基于实景三维的土地综合整治监管与成效评估技术应用”技术成果评价会。由中国科学院院士、…

机器学习实践系列之12 - OpenCV之三维重建
又一次提到了 三维重建,许是三维重建的应用面太广,从 PrimSense 到 Kinnect 再到RealSense,还有一堆国内的山寨机不表。 从 Kinnect Fusion 到 Project Tango,伟大的项目 见证着一个说法:世界总归是三维的。 那就用 3D…

3D人体姿态估计项目 | 从2D视频中通过检测人体关键点来估计3D人体姿态实现
项目应用场景 人体姿态估计是关于图像或视频中人体关节的 2D 或 3D 定位。一般来说,这个过程可以分为两个部分:(1) 2D 视频中的 2D 关键点检测;(2) 根据 2D 关键点进行 3D 位姿估计。这个项目使用 Detectron2 从任意的 2D 视频中检测 2D 关节…
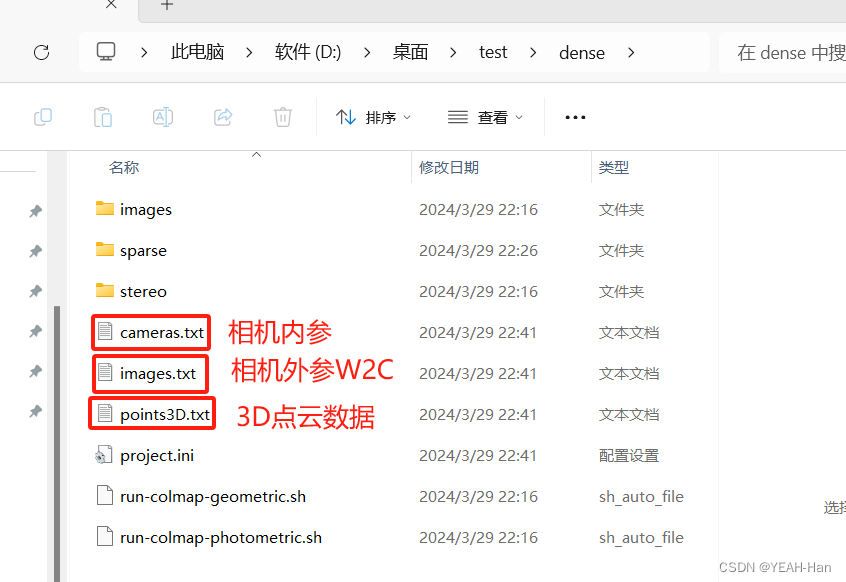
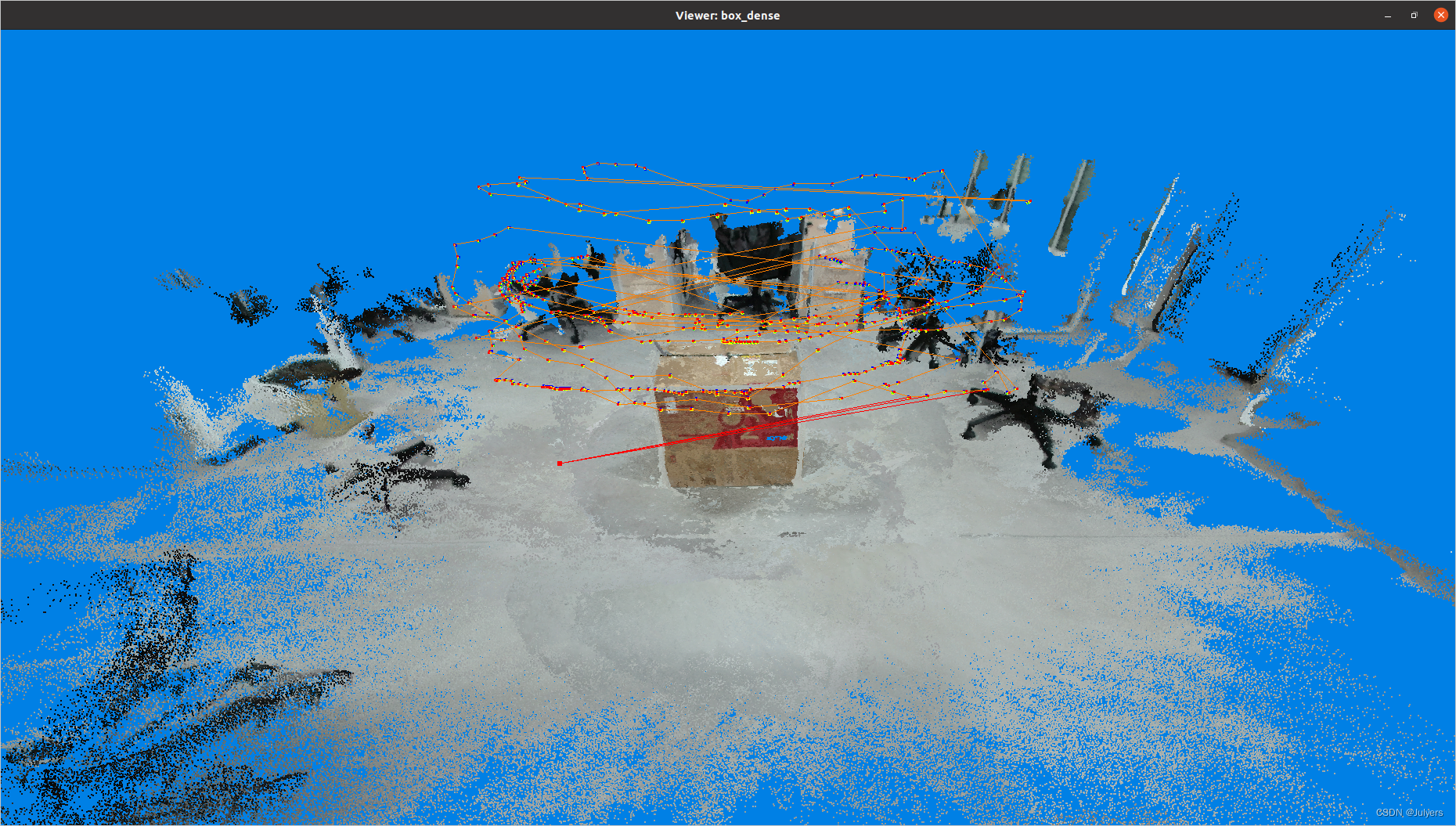
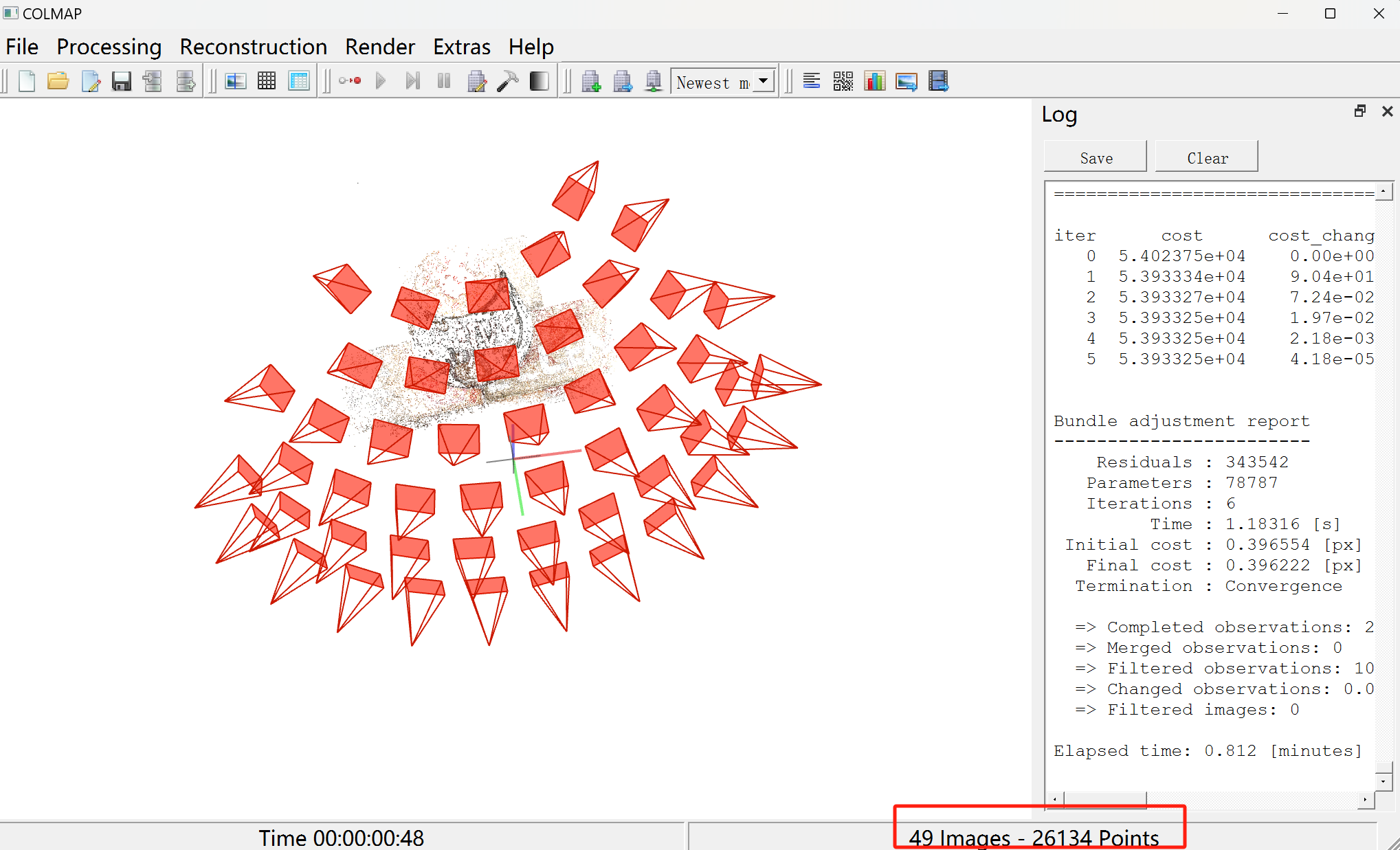
COLMAP(Windows)实现SFM三维重建位姿估计
问题产生:
Guassian splatting第一步用colmap进行位姿估计,图片匹配失败,输出图片全靠运气,最少的时候甚至一张都没匹配上,所以想到用colmap软件先进行匹配,再放入高斯训练。
colmap使用步骤:…

计算机视觉之三维重建(5)---双目立体视觉
文章目录 一、平行视图1.1 示意图1.2 平行视图的基础矩阵1.3 平行视图的极几何1.4 平行视图的三角测量 二、图像校正三、对应点问题3.1 相关匹配法3.2 归一化相关匹配法3.3 窗口问题3.4 相关法存在的问题3.5 约束问题 一、平行视图
1.1 示意图 如下图即是一个平行视图。特点&a…
colmap+openMVS稠密重建
简要记录一下colmapopenMVS稠密重建相关使用
openMVS的sample使用
测试数据集下载 链接:https://pan.baidu.com/s/13T04aKJ2OB6_RX7IMMGhpg 提取码:oxkp运行测试 将data放在OPENMVS/路径下。
cd ~/Documents/OPENMVS/openMVS/openMVS_build
./bin/Den…

计算机视觉之三维重建(7)---多视图几何(下)
文章目录 一、透视结构恢复问题1.1 概述1.2 透视结构恢复歧义1.3 代数方法1.4 捆绑调整 二、P3P问题三、随机采样一致性 一、透视结构恢复问题
1.1 概述 1. 透视结构恢复问题:摄像机为透视相机,内外参数均未知。 2. 问题:已知 n n n 个三维…
ActiViz中的图像处理vtkImageViewer2
文章目录 前言一、功能特点二、构造函数三、成员函数四、常见问题和注意事项五、数据数组在科学计算和可视化中的应用实例1. 图像数据的加载和显示2. 图像的缩放、平移和旋转操作3. 图像的亮度、对比度调整前言
vtkImageViewer2 类是 VTK(Visualization Toolkit)中的一个重要…
ActiViz对图像数据的访问和处理
文章目录 前言一、图像信息的基本概念1、图像数据的结构和组织2、图像数据的表示方式二、使用ActiViz访问图像信息1、加载图像数据2、获取图像尺寸和通道数3、访问像素值4、获取和修改图像的元数据信息三、图像信息的修改与处理1、修改图像像素值2、图像滤波和增强四、图像几何…

P3P Kneip - A Novel Parametrization of the Perspective-Three-Point Problem for a Direct Computation
P3P Kneip - A Novel Parametrization of the Perspective-Three-Point Problem for a Direct Computation of Absolute Camera Position and Orientation論文研讀
前言
Perspective-Three-Point (P3P)問題的目標是在已知P1,P2,P3P_1,P_2,P_3P1,P2,P3三個三維點和對應的…
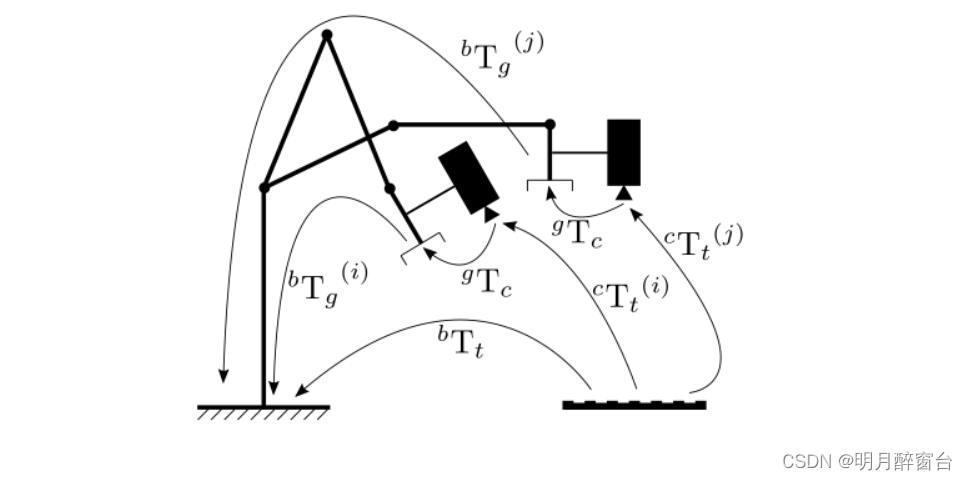
机器人控制算法九之 位姿描述与空间变换
机器人控制算法九之 位姿描述与空间变换 相关内容: 位姿空间变换欧拉角与RPY角… 一个简单的机器人场景中的坐标系展示:
1.刚体位姿描述
研究机器人操作臂的运动:涉及各连杆位姿关系、连杆与周围环境(操作对象和障碍物…
對極幾何基礎矩陣求解 - 七點法
對極幾何基礎矩陣求解 - 七點法前言基礎矩陣基礎矩陣求解方法七點法推導參考連結前言
一個三維點xxx在兩個相機中的投影分別為x1x_1x1及x2x_2x2,這兩個投影點座標需滿足"對極約束",即x2TFx10x_2^TFx_1 0x2TFx10。其中的FFF即為基礎矩…
Colmap 实用教程 —— Command-line Interface
https://colmap.github.io/index.html
Windows 通过 COLMAP.bat,Linux 通过 colmap 使用命令行调用 Colmap 工具。
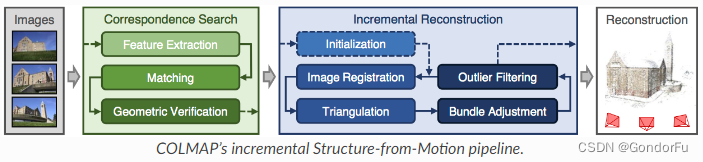
Structure-from-Motion 简要介绍 从大范围来看的话,整个流程可以分成以下三个阶段:
Feature detection and extractionFe…
mve - Kneip P3P代碼研讀筆記
mve - Kneip P3P代碼研讀筆記前言libs/sfm/pose_p3p.ccsolve_quartic_rootspose_p3p_kneipexamples/task2/task2-2_test_p3p_kneip.ccmain前言
本篇是研讀simonfuhrmann/mve及weisui-ad/ImageBasedModellingEdu中Kneip P3P代碼的筆記,關於Kneip P3P論文的介紹&…
MVSNeRF:多视图立体视觉的快速推广辐射场重建(2021年)
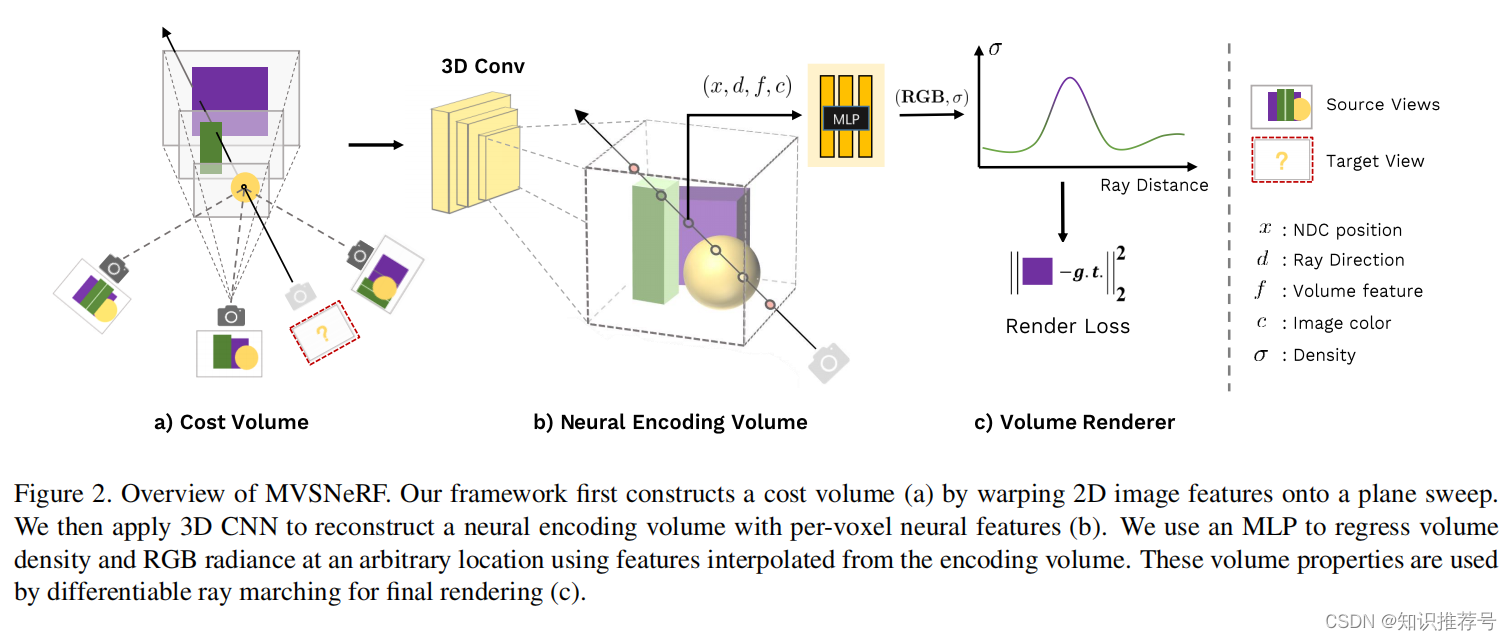
MVSNeRF:多视图立体视觉的快速推广辐射场重建(2021年) 摘要1 引言2 相关工作3 MVSNeRF实现方法3.1 构建代价体3.2 辐射场的重建 Anpei Chen and Zexiang Xu and Fuqiang Zhao et al. MVSNeRF: Fast Generalizable Radiance Field Reconstruct…
基于深度学习的三维重建从入门实战教程 原理讲解 源码解析 实操教程课件下载
传统的重建方法是使用光度一致性等来计算稠密的三维信息。虽然这些方法在理想的Lambertian场景下,精度已经很高。
但传统的局限性,例如弱纹理,高反光和重复纹理等,使得重建困难或重建的结果不完整。
基于学习的方法可以引入比如镜面先验和反射先验等全局语义信息,使匹配…
哪些 3D 建模软件值得推荐?
云端地球是一款免费的在线实景三维建模软件,不需要复杂的技巧,只要需要手机,多拍几张照片,就可以得到完整的三维模型!
无论是大场景倾斜摄影测量还是小场景、小物体建模,都可以通过云端地球将二维数据向三…

共赢未来 | 大势智慧与安康市自然资源信息科技有限公司达成战略合作
10月17日至18日,安康市自然资源信息科技有限公司总经理黄光俊带领技术团队到武汉大势智慧科技有限公司围绕“实景三维中国、数字化建设”开展交流调研,并签署战略合作协议。 双方表示将以市场需求为导向,以技术创新为依托,建立长期…
相機內參矩陣K及其反矩陣推導與mve代碼研讀
相機內參矩陣K及其反矩陣推導與mve代碼研讀前言Kfill_calibrationK−1K^{-1}K−1fill_inverse_calibration前言
相機內參KKK將歸一化像平面上的點轉為圖像座標系上的點。
本篇由KKK推導出K−1K^{-1}K−1並與simonfuhrmann/mve裡的代碼做對照。
K
將世界座標系下歸一化像平面…
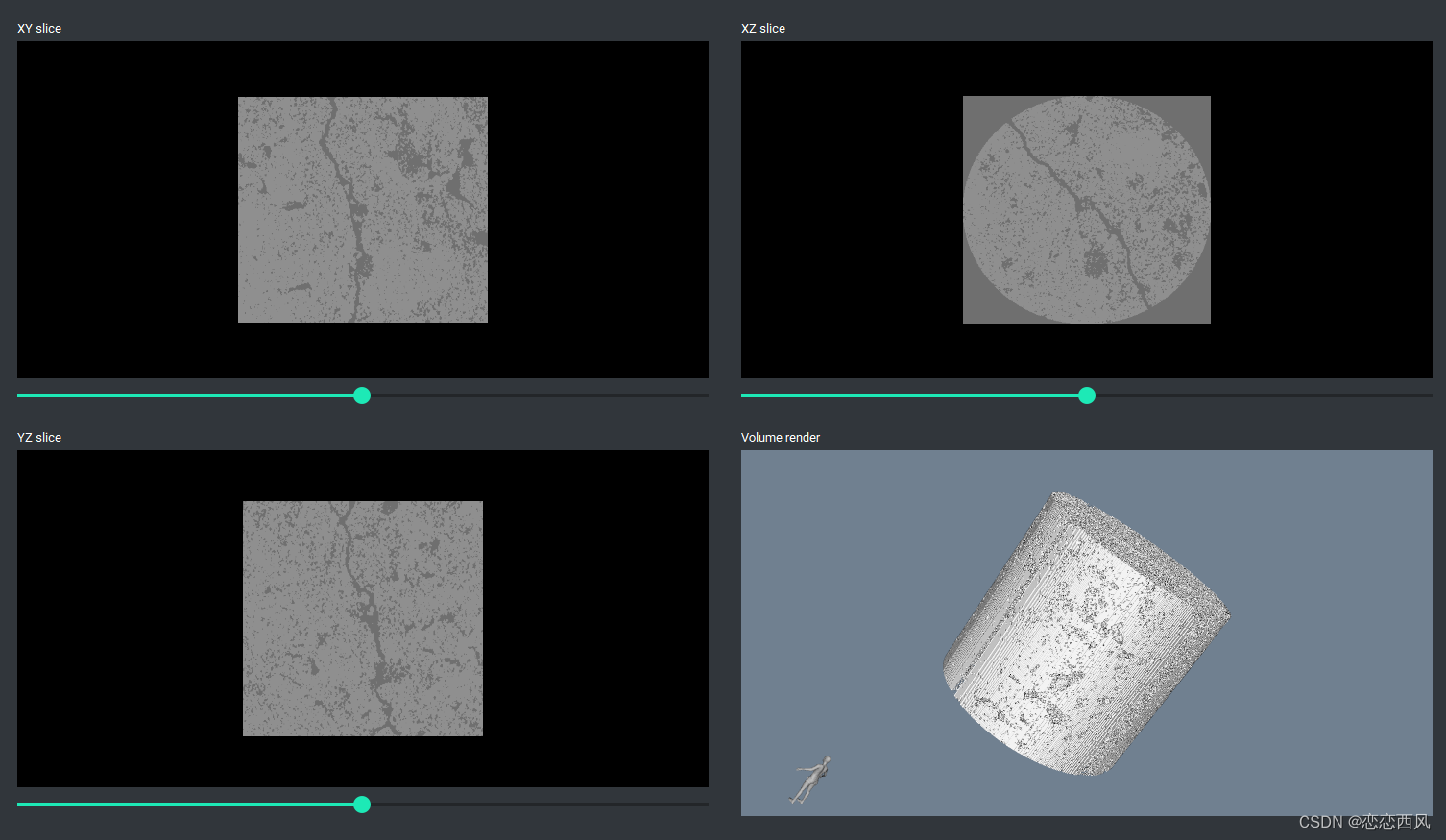
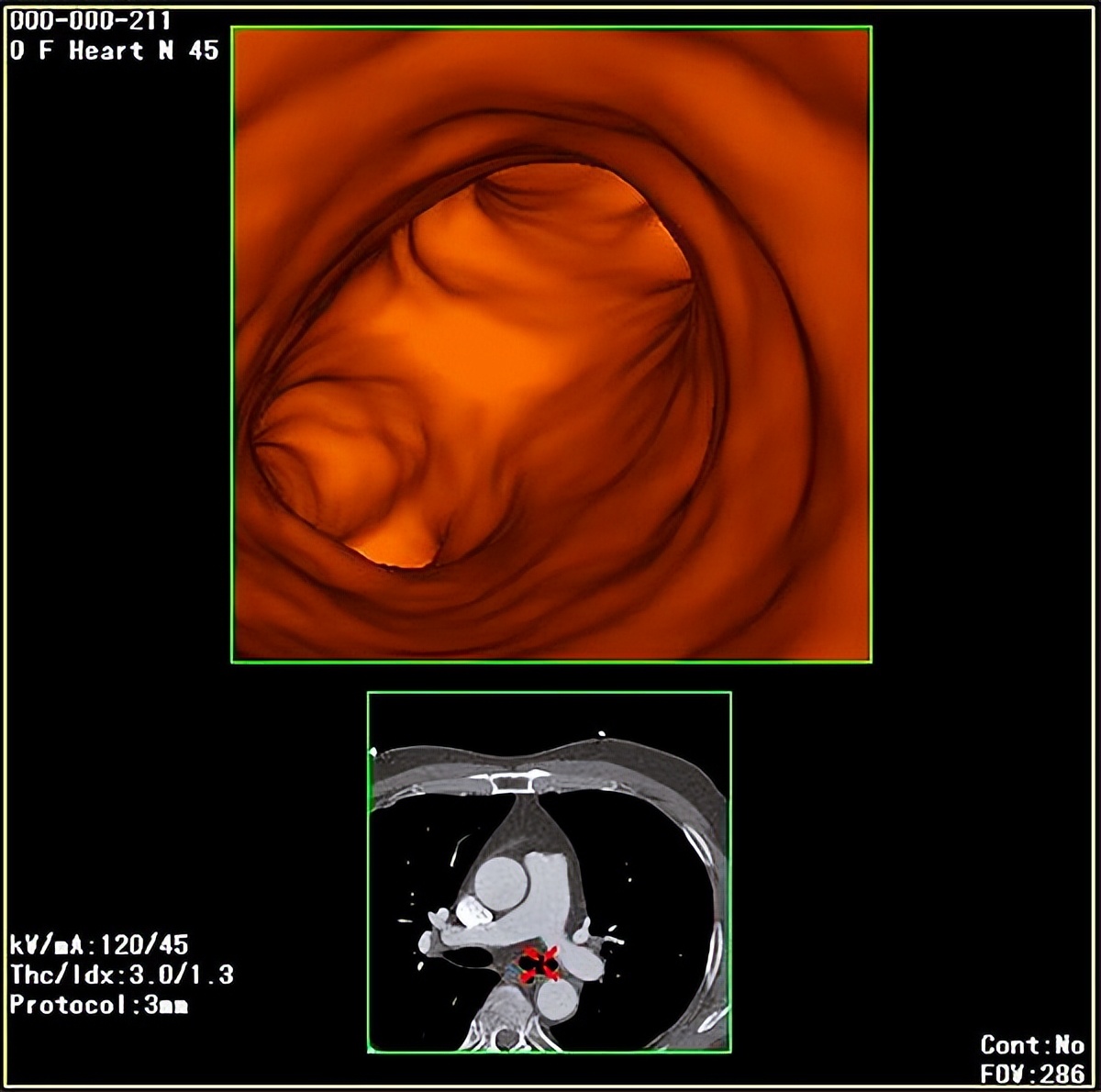
工业CT 三维重建 及分割
目录 工业CT介绍
工业CT主要应用于以下领域: CT三维重建软件:
效果: 工业CT介绍
工业CT设备是基于线阵探测器的断层扫描技术,是一种常用的无损检测技术,用于获取物体内部的准确三维结构信息。它通过X射线的投射和接…
ActiViz中的数据集vtkPolyData
文章目录 前言一、数据结构二、数据内容三、几何操作四、数据导入与导出五、数据可视化六、函数详解1、SetPoints(vtkPoints points):2、SetPolys(vtkCellArray polys):3、GetNumberOfPoints():4、GetNumberOfCells():5、GetPointData():6、GetCellData():7、Ge
如何将las数据转换为osgb数据?
答:如果是需要用点云建模可使用重建大师。如果只是想转换格式可以使用网格大师的点云转osgb工具。 重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像控点,输出…
CV计算机视觉每日开源代码Paper with code速览-2023.11.15
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构:CNN】PadChannel: Improving CNN Performance through Explicit Padding Encoding 论文地址:https:/…

大势智慧代理商体系持续开疆拓土,全国代理火热招募中...
11月15日,武汉大势智慧科技有限公司(后简称“大势智慧”)与上海宝天信息科技有限公司(后简称“宝天信息”)金牌代理商签约授牌仪式成功举行。大势智慧副总裁周济安先生、宝天信息经理王芳女士分别作为双方签约代表出席…

Cascade-MVSNet论文笔记
Cascade-MVSNet论文笔记 摘要1 立体匹配(Stereo Matching)2 多视图立体视觉(Multi-View Stereo)3 立体视觉和立体视觉的高分辨率输出4 代价体表达方式(Cost volume Formulation)4.1 多视图立体视觉的3D代价…

再添合作 | 大势智慧与长沙市规划信息服务中心签订战略合作协议
10月18日,武汉大势智慧科技有限公司(以下简称:大势智慧)与长沙市规划信息服务中心(以下简称)战略合作签约仪式在长沙举行。大势智慧CTO张帆与长沙市规划信息服务中心生产经营总监杨凤京代表双方签署战略合作…
【PACS系统源码】与医院HIS系统双向数据交换,实现医学影像集成与影像后处理功能
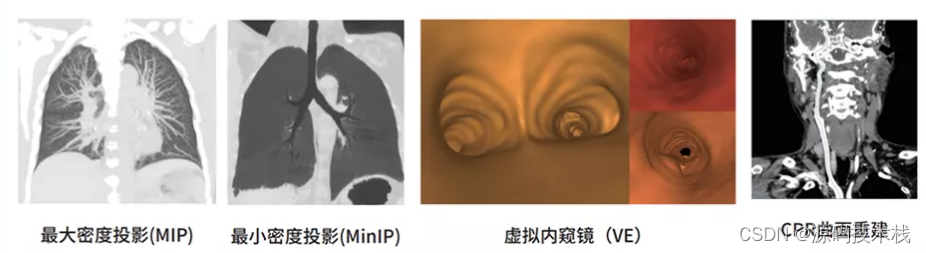
医院医学影像PACS系统源码,集成三维影像后处理功能,包括三维多平面重建、三维容积重建、三维表面重建、三维虚拟内窥镜、最大/小密度投影、心脏动脉钙化分析等功能。系统功能强大,代码完整。 PACS系统与医院HIS实现双向数据交换,…

ubuntu20.04下源码编译colmap3.9
由于稠密重建需要CUDA,因此先安装CUDA,我使用的是3050GPU,nvidia-smi显示最高支持CUDA11.4。 不要用sudo apt安装,版本较低,30系显卡建议安装CUDA11.0以上,这里安装了11.1版本。
下载: cuda_1…
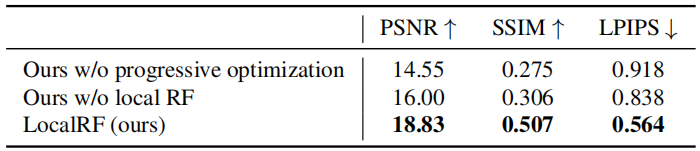
【分块三维重建】【slam】LocalRF:逐步优化的局部辐射场鲁棒视图合成(CVPR 2023)
项目地址:https://localrf.github.io/ 题目:Progressively Optimized Local Radiance Fields for Robust View Synthesis 来源:KAIST、National Taiwan University、Meta 、University of Maryland, College Park
提示:文章用了s…
实验笔记之——Ubuntu20.04配置nvidia以及cuda并测试3DGS与SIBR_viewers
之前博文测试3DGS的时候一直用服务器进行开发,没有用过笔记本,本博文记录下用笔记本ubuntu20.04配置过程~
学习笔记之——3D Gaussian Splatting源码解读_3dgs运行代码-CSDN博客文章浏览阅读3.2k次,点赞34次,收藏62次…
ActiViz中的数据集vtkRectilinearGrid
文章目录 前言一、vtkRectilinearGrid概述二、vtkRectilinearGrid常用函数详解三、vtkRectilinearGrid常用函数用法详解与示例代码四、vtkRectilinearGrid的进阶应用与技巧五、总结前言
vtkRectilinearGrid是VTK(Visualization Toolkit)中的一个重要类,用于表示具有规则网格…
【三维重建】【slam】【分块重建】LocalRF:逐步优化的局部辐射场的鲁棒视图合成
项目地址:https://localrf.github.io/ 题目:Progressively Optimized Local Radiance Fields for Robust View Synthesis 来源:KAIST、National Taiwan University、Meta 、University of Maryland, College Park
提示:文章用了s…

计算机视觉之三维重建(2)---摄像机标定
文章目录 一、回顾线代1.1 线性方程组的解1.2 齐次线性方程组的解 二、透镜摄像机的标定2.1 标定过程2.2 提取摄像机参数2.3 参数总结 三、径向畸变的摄像机标定3.1 建模3.2 求解 四、变换4.1 2D平面上的欧式变换4.2 2D平面上的相似变换和仿射变换4.3 2D平面上的透射变换4.4 3D…
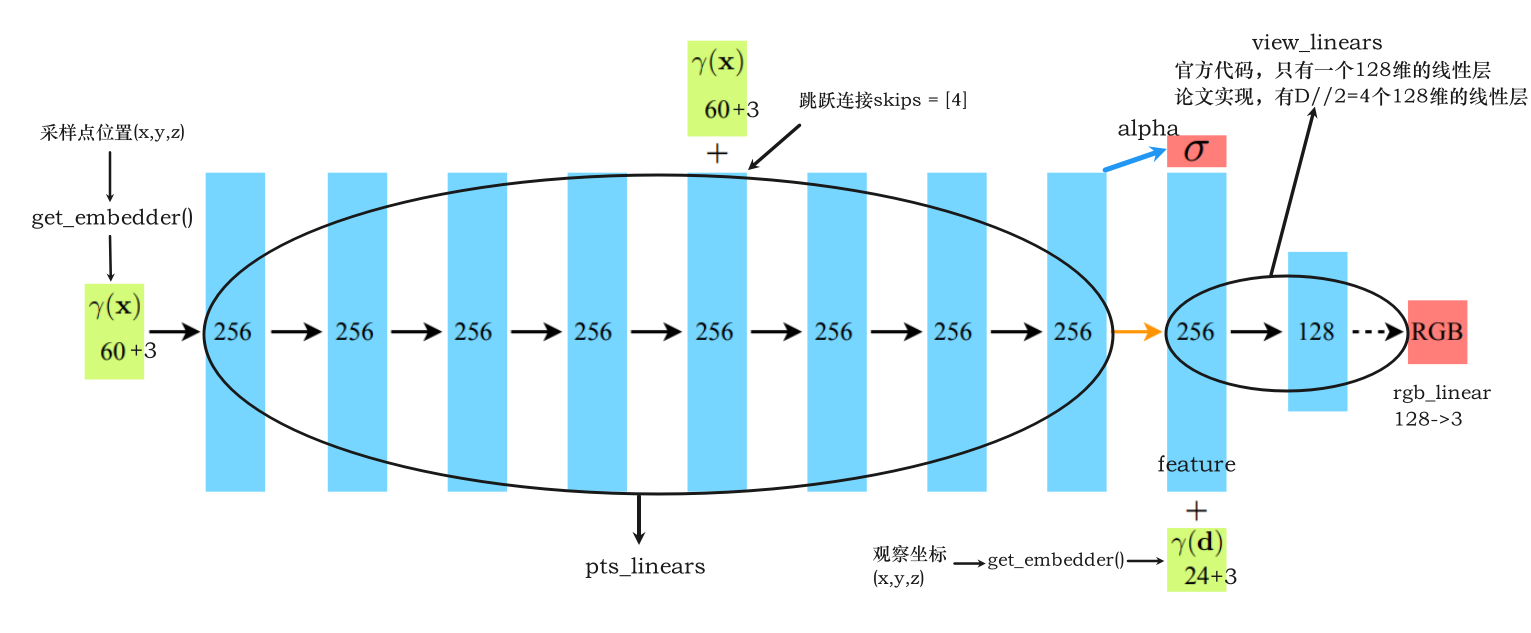
NeRF学习——NeRF-Pytorch的源码解读
学习 github 上 NeRF 的 pytorch 实现项目(https://github.com/yenchenlin/nerf-pytorch)的一些笔记
1 参数
部分参数配置: 训练参数: netdepth:神经网络的层数。默认值为8 netwidth:每层的通道数。默认…
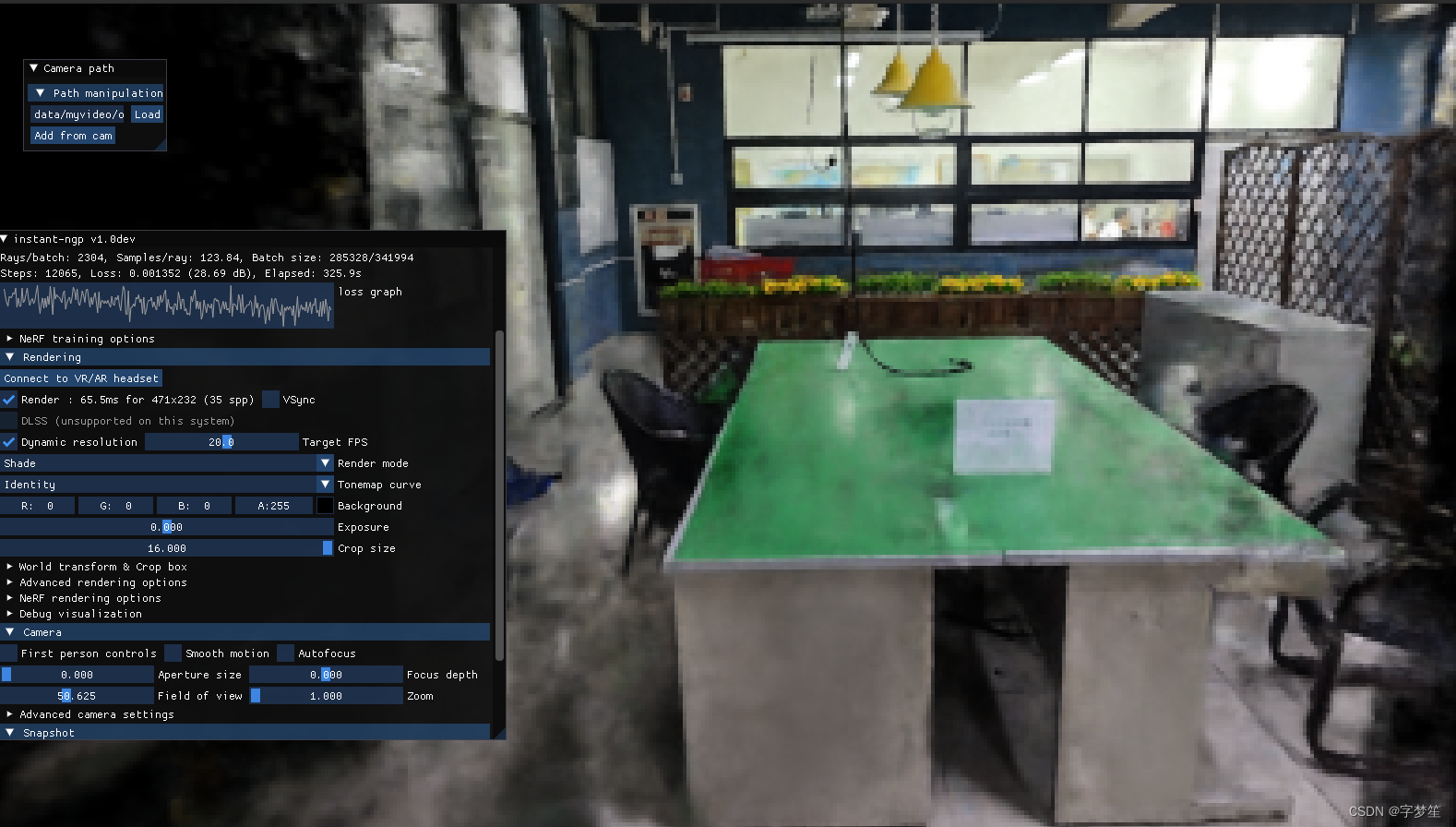
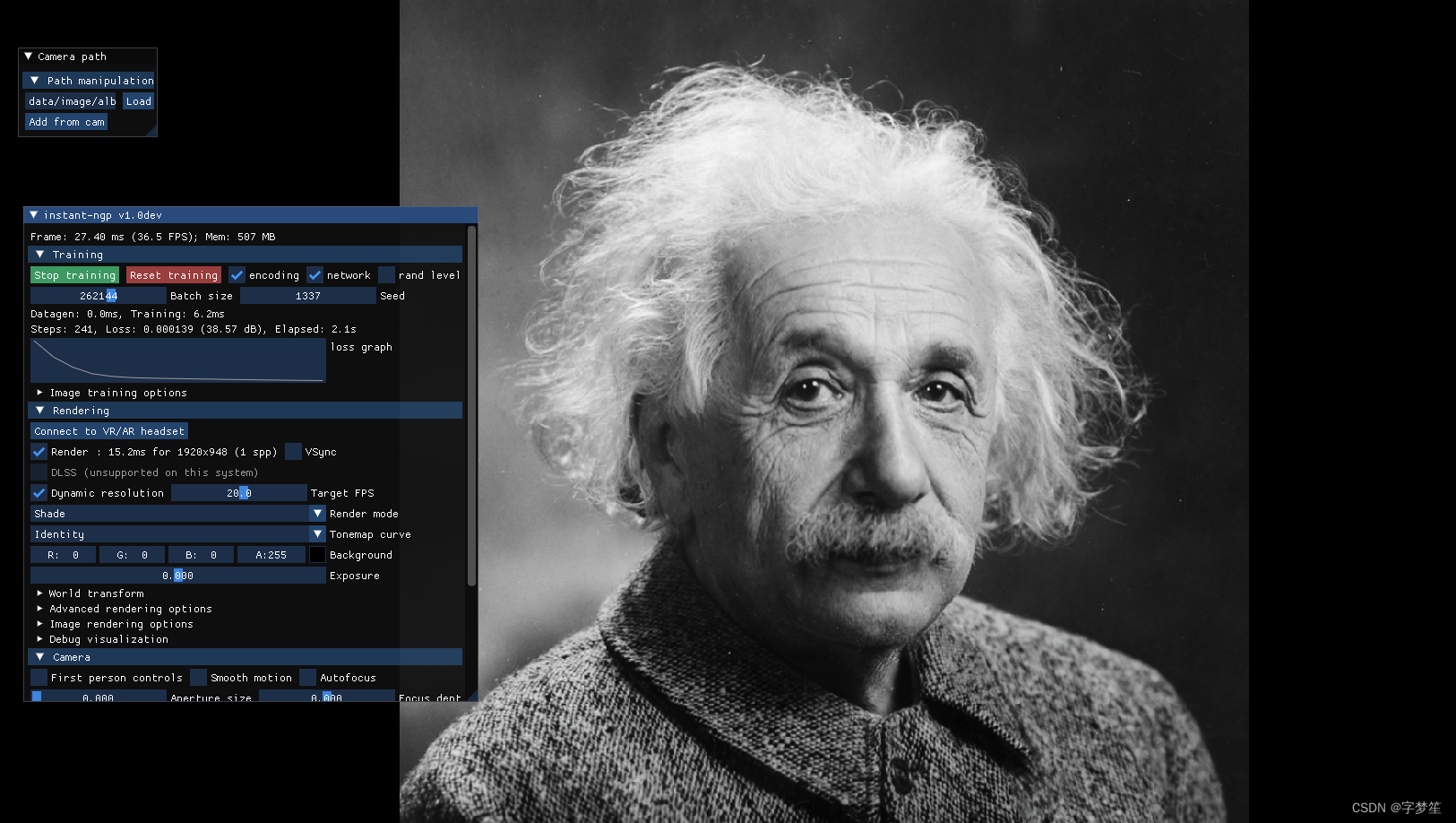
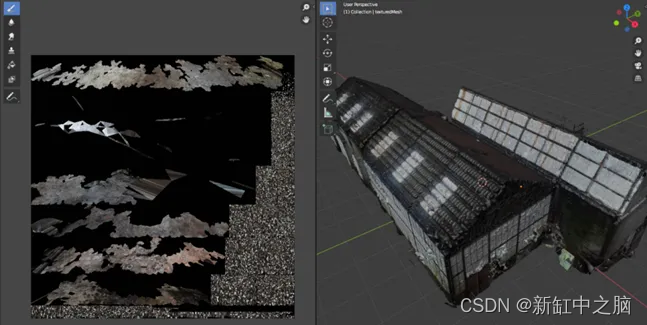
ubuntu20.04 nerf Instant-ngp (下) 复现,自建数据集,导出mesh
参考链接
Ubuntu20.04复现instant-ngp,自建数据集,导出mesh_XINYU W的博客-CSDN博客
GitHub - NVlabs/instant-ngp: Instant neural graphics primitives: lightning fast NeRF and more youtube上的一个博主自建数据集 https://www.youtube.com/watch…
【三维重建】【SLAM】SplaTAM:基于3D高斯的密集RGB-D SLAM
题目:SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM 地址:spla-tam.github.io 机构:CMU(卡内基梅隆大学)、MIT(美国麻省理工) 总结:SplaTAM,一个新…
如果对类似汽车这种单体进行建模,围绕一圈拍摄,普通的手机或者相机拍摄的照片有足够的重叠度就能建模吗?不需要专业的设备可以吗?
答:可以建模。提供了完备的单体照片,在不需专业设备的情况下也可实现建模。
重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像控点,输出高精度彩色…

医学影像系统【简称PACS】源码
PACS(Picture Archiving and Comuniations Systems)即PACS,图像存储与传输系统,是应用于医院中管理医疗设备如CT,MR等产生的医学图像的信息系统。目标是支持在医院内部所有关于图像的活动,集成了医疗设备,图像存储和分…
ubuntu20.04下源码编译colmap
由于稠密重建需要CUDA,因此先安装CUDA,我使用的是3050GPU,nvidia-smi显示最高支持CUDA11.4。 不要用sudo apt安装,版本较低,30系显卡建议安装CUDA11.0以上,这里安装了11.1版本。
下载: cuda_1…
【3D reconstruction 学习笔记 第二部】
三维重建 3D reconstruction 4. 三维重建与极几何三角化(线性解法)三角化(非线性解法)多视图几何极几何极几何约束基础矩阵估计 5. 双目立体视觉重建6. 多视图重建7. SFM 系统设计8. SLAM系统设计 4. 三维重建与极几何 三角化&…

不需要COLMAP的3DGS投影?
论文标题:COLMAP-Free 3D Gaussian Splatting
论文作者:Yang Fu, Sifei Liu, Amey Kulkarni, Jan Kautz, Alexei A. Efros, Xiaolong Wang 导读: 本文介绍了一种新的神经渲染方法,用于在不需要预先计算相机参数的条件下进行场景重…
重建大师生产出来的las可以合并成一个文件吗?
答:软件内部没有合并功能,需要借助第三方工具例如cloudcompare进行合并。
重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像控点,输出高精度彩色网…
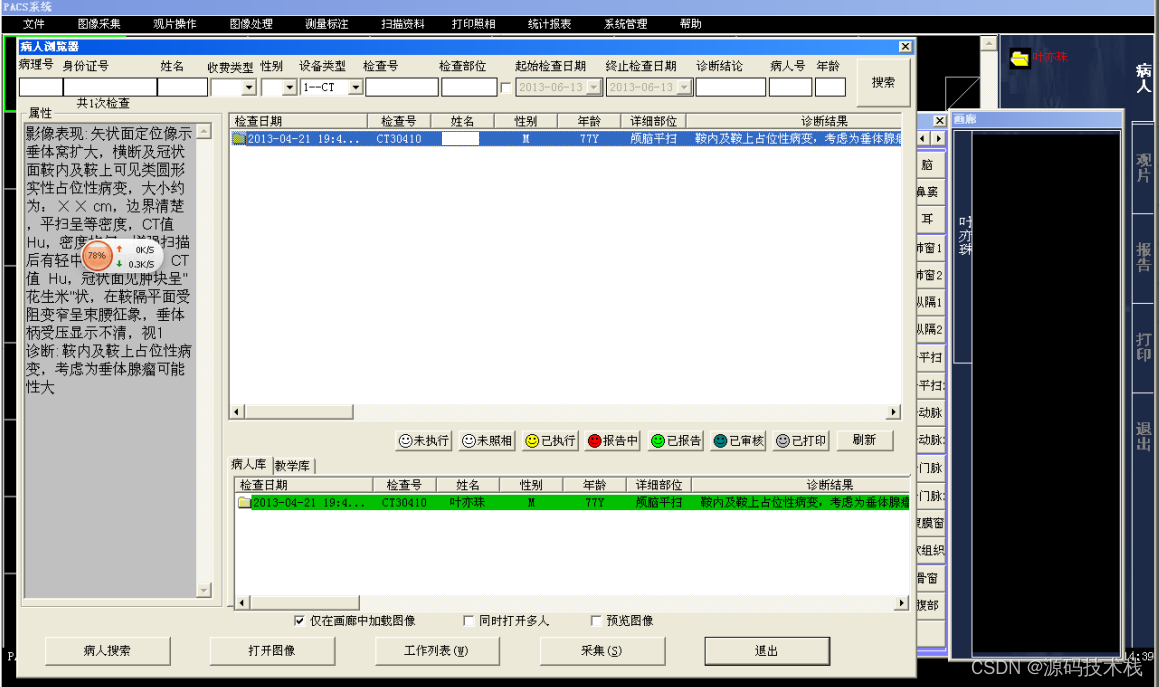
【C++】PACS医学图像存储和传输系统源码带三维重建
PACS(Picture Archiving and Communication System)系统作为医学图像的存储和传输平台,为医生和患者提供了便捷高效的诊疗服务支持。近年来,三维重建技术在PACS系统中的应用越来越广泛。 三维后处理功能是临床数字技术中的重要组成…

常见的三维建模软件有哪些?
云端地球是一款免费的在线实景三维建模软件,不需要复杂的技巧,只要需要手机,多拍几张照片,就可以得到完整的三维模型!
无论是大场景倾斜摄影测量还是小场景、小物体建模,都可以通过云端地球将二维数据向三…

基于FANUC工业机器人的坐标系转换、多视角拼接与三维重建
0.简介
总体任务:机械臂末端安装三维相机,绕着工件进行拍摄,并在计算机中将每次拍摄的点云合并在同一个坐标系下,从而获得更加完整全面的点云。机械臂:FANAUC相机:梅卡曼德技术方案:使用相机外…
反对称矩阵的特征值及性质
目录写在前面结论反对称矩阵反对称矩阵的特征值是0或纯虚数由性质推导实例推导3x3的反对称矩阵秩为2参考完写在前面
1、文中所有资源、参考已给出来源链接,如有侵权请联系删除 2、码字不易,转载本文请注明出处,本文链接:https://…

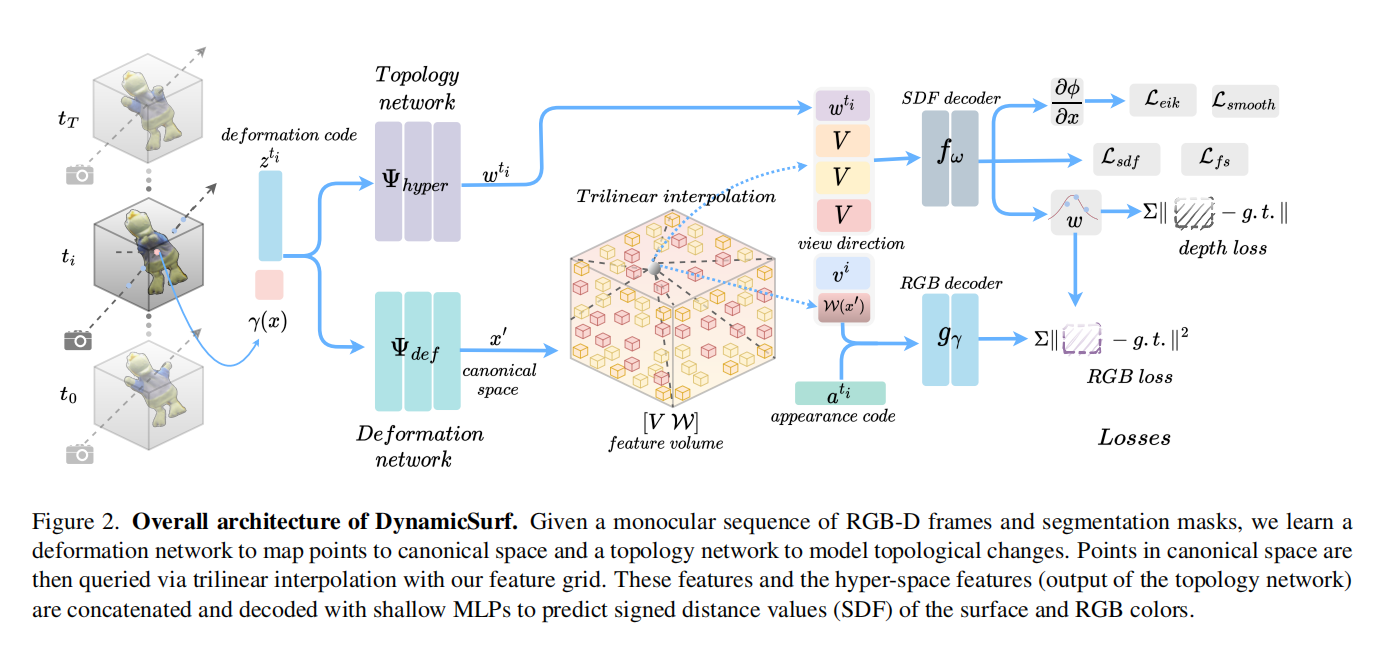
【动态三维重建】Deformable 3D Gaussians 可变形3D GS用于单目动态场景重建(CVPR 2024)
主页:https://ingra14m.github.io/Deformable-Gaussians/ 代码:https://github.com/ingra14m/Deformable-3D-Gaussians 论文:https://arxiv.org/abs/2309.13101 文章目录 摘要一、前言二、相关工作2.1 动态场景的神经渲染2.2 神经渲染加速 三…

openmvs编译与使用
目录写在前面获取代码cmakeboostopencveigenCGALVCGglew和glfwJPEG,PNG等库...编译使用注意事项:可视化Dense Point-Cloud Reconstruction稠密重建Rough Mesh Reconstruction 生成meshMesh Refinement mesh精细化Mesh Texturing 纹理映射参考完写在前面
1、内容 op…

医院影像科PACS系统源码,医学影像系统,支持MPR、CPR、MIP、SSD、VR、VE三维图像处理
PACS系统是医院影像科室中应用的一种系统,主要用于获取、传输、存档和处理医学影像。它通过各种接口,如模拟、DICOM和网络,以数字化的方式将各种医学影像,如核磁共振、CT扫描、超声波等保存起来,并在需要时能够快速调取…

使用MeshLab软件处理pcd点云文件
目录前言1.安装MeshLab软件2.利用pcl库将pcd文件转成ply文件3.利用MeshLab旋转ply点云4.将ply文件转为pcd文件5.将ply文件转为pcd文件(添加读取配置文件版本)前言
在使用D435i相机跑ORB-SLAM2_RGBD_DENSE_MAP-master稠密建图的过程中,发现最…
讲解: 截断符号距离函数(Truncated Signed Distance Function,TSDF)
文章目录 1 截断符号距离函数(Truncated Signed Distance Function, TSDF)概念定义2 TSDF用途:3 TSDF实现方式:4 总结 1 截断符号距离函数(Truncated Signed Distance Function, TSDF)概念定义
截断符号距…

论文笔记《3D Gaussian Splatting for Real-Time Radiance Field Rendering》
项目地址
原论文
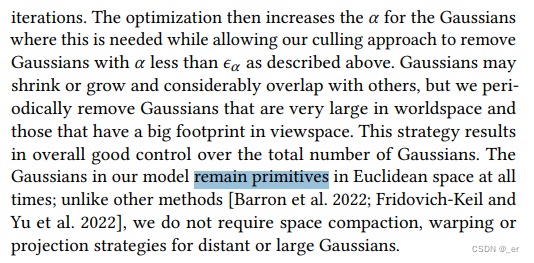
Abstract
最近辐射场方法彻底改变了多图/视频场景捕获的新视角合成。然而取得高视觉质量仍需神经网络花费大量时间训练和渲染,同时最近较快的方法都无可避免地以质量为代价。对于无边界的完整场景(而不是孤立的对象)和 10…

传统图形学对nerf的对比与应用落地
作者今年参加了China3DV的盛会,大会的发表、线下讨论、学者、工业界等等的交流着实对于Nerf有了更深的思考,以下是作者的抛砖引玉,如有不当之处敬请指出~
传统图形学与nerf的简介:
传统图形学:显示表达几何表达方式&…

大势速影:机载激光快速建模测绘装备
实景三维模型高逼真、高真实、高精度的展示地物的几何结构、纹理色彩、空间位置等信息,在当前测绘应急保障、规划等领域具备极大的应用价值。但是,激光雷达和倾斜摄影建模技术均无法较好的满足快速建模应用需求,具体表现在:激光点…
三维PACS系统 医院放射影像后处理源码
PACS是一个涉及放射医学、影像医学、数字图像技术(采集和处理)、计算机与通讯、C/S体系结构的多媒体数据库管理信息系统,涉及软件工程、图形图像的综合及后处理等多种技术,是一个技术含量高、实践性强的高技术复杂系统。 一、放射科基础三维重建
1、放射…

3 OpenCV两张图片实现稀疏点云的生成
前文: 1 基于SIFT图像特征识别的匹配方法比较与实现 2 OpenCV实现的F矩阵RANSAC原理与实践
1 E矩阵
1.1 由F到E E K T ∗ F ∗ K E K^T * F * K EKT∗F∗K
E 矩阵可以直接通过之前算好的 F 矩阵与相机内参 K 矩阵获得
Mat E K.t() * F * K;相机内参获得的方式…
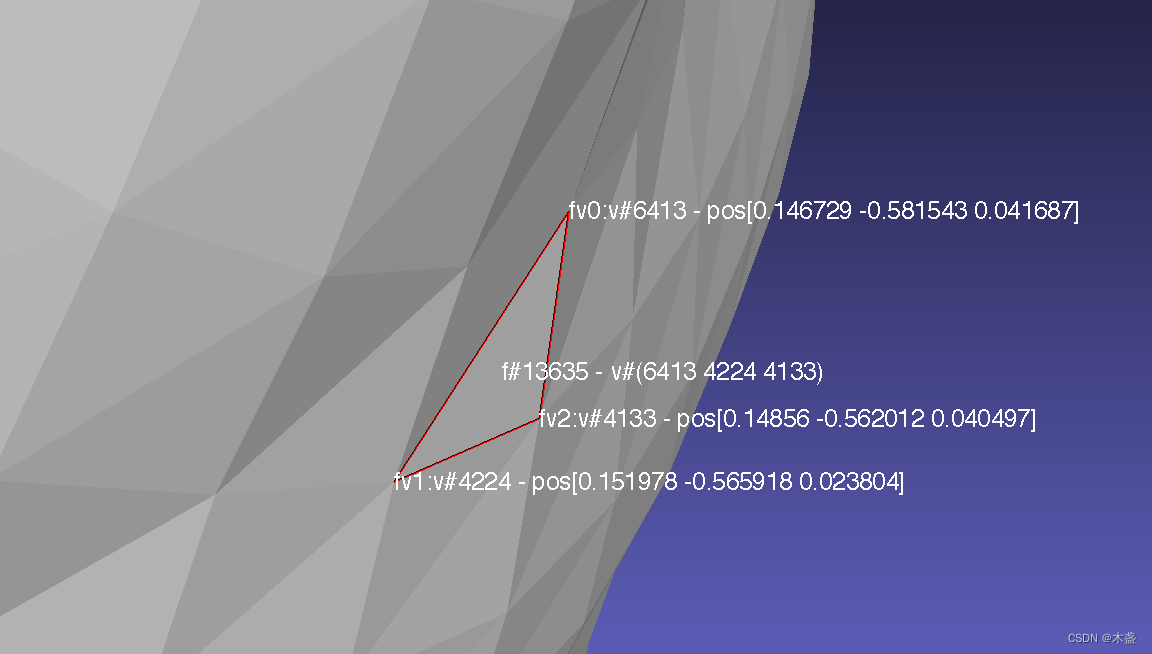
Mesh网格obj文件构成解析
众所周知,Mesh网格是三维重建的常用手法,通过顶点-三角面的形式来完成对三维物体的表达。其中,最常见的Mesh网格文件格式就是obj格式。看起来复杂的三维形状其实在数值表示上是很简单的,大家跟我一起来做个小实验就好:…
OpenCV两张图片实现稀疏点云的生成
1 E矩阵
1.1 由F到E E K T ∗ F ∗ K E K^T * F * K EKT∗F∗K
E 矩阵可以直接通过之前算好的 F 矩阵与相机内参 K 矩阵获得
Mat E K.t() * F * K;相机内参获得的方式是一个较为复杂的方式,需要使用棋盘进行定位获得,我们这里直接使用了 OpenMVG 提…
matlab相机标定知识整理
matlab相机标定知识整理 单目相机标定 单目相机标定
内参矩阵:cameraParams.Intrinsics.K 或者 cameraParams.K旋转矩阵:cameraParams.RotationMatrices 有待确定 cameraParams.RotationVectors平移矩阵:cameraParams.TranslationVectors径向…
【AI视野·今日CV 计算机视觉论文速览 第282期】Wed, 3 Jan 2024
AI视野今日CS.CV 计算机视觉论文速览 Wed, 3 Jan 2024 Totally 70 papers 👉上期速览✈更多精彩请移步主页 Daily Computer Vision Papers
Street Gaussians for Modeling Dynamic Urban Scenes Authors Yunzhi Yan, Haotong Lin, Chenxu Zhou, Weijie Wang, Haiya…
【辐射场】3D Gaussian Splatting
三维高斯…喷喷 \, 3D Gaussian Splatting,下文简称3DGS,是好一段时间以来在三维内容创作和三维重建领域比较有热度的一项技术。 它属于基于图像的三维重建方法,意思就是你对现实物体或者场景拍照片,就能给你训练成一个场景模型&a…
CHINTERGEO2023中国测绘地理信息技术装备展览会,大势智慧在3010展台期待您的莅临!
11月27日-11月29日
CHINTERGEO2023中国测绘地理信息技术装备展览会
二层-HALL3展厅-3010
大势智慧携符合信创要求的实景三维软硬件全流程解决方案
为您带来一场全国产、真安全的实景三维新型智能测绘装备盛宴
期待您的莅临!
三维点云重建 — open3d python
这里三维点云重建是指根据三维点云重建目标的表面或轮廓,即表面重建。三维点云是一批离散的点,这样空间中必然回有一些位置是空的,没有数据信息。点云重建是让三维物体的表面都由一个个平面组成,即在表面处成为连续状态。这里仅介…

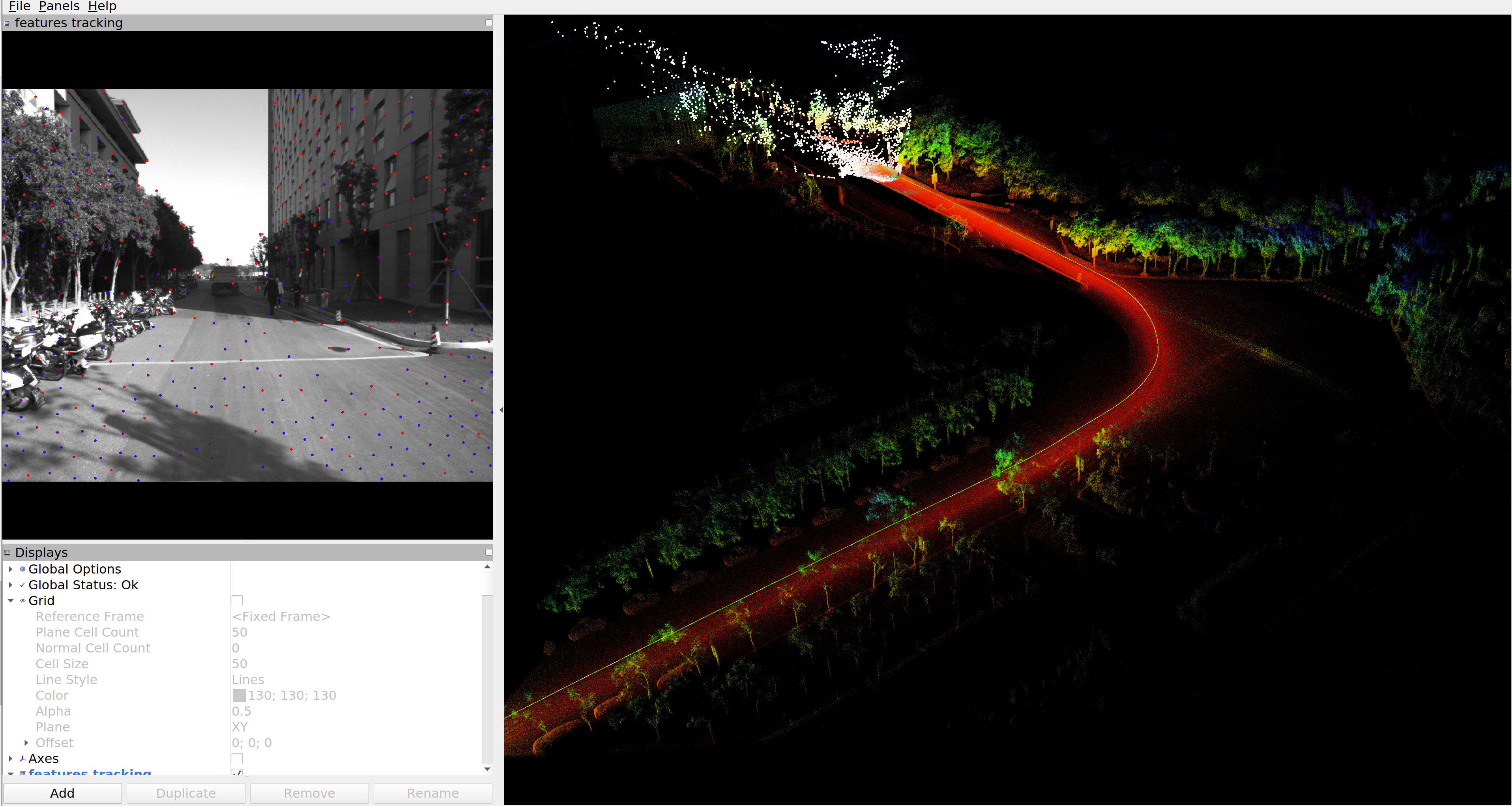
工程(十三)——基于激光视觉的SLAM三维重建
博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。这是一个科研互助群,主要围绕机器人,无人驾驶,无人机方面的感知定位,决策规划,以及论文发表经验,以方便大家很好很快的科研…
Talk | 牛津大学博士后研究员边佳旺:SC-DepthV3-动态场景中的自监督单目深度估计
本期为TechBeat人工智能社区第550期线上Talk。 北京时间11月23日(周四)20:00,牛津大学博士后研究员—边佳旺的Talk已准时在TechBeat人工智能社区开播! 他与大家分享的主题是: “SC-DepthV3:动态场景中的自监督单目深度估计”,介绍…
【AI视野·今日Robot 机器人论文速览 第六十八期】Tue, 2 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Tue, 2 Jan 2024 Totally 12 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Edge Computing based Human-Robot Cognitive Fusion: A Medical Case Study in the Autism Spectrum Disorder Therapy Author…
【C++】医学影像归档和通信系统-PACS
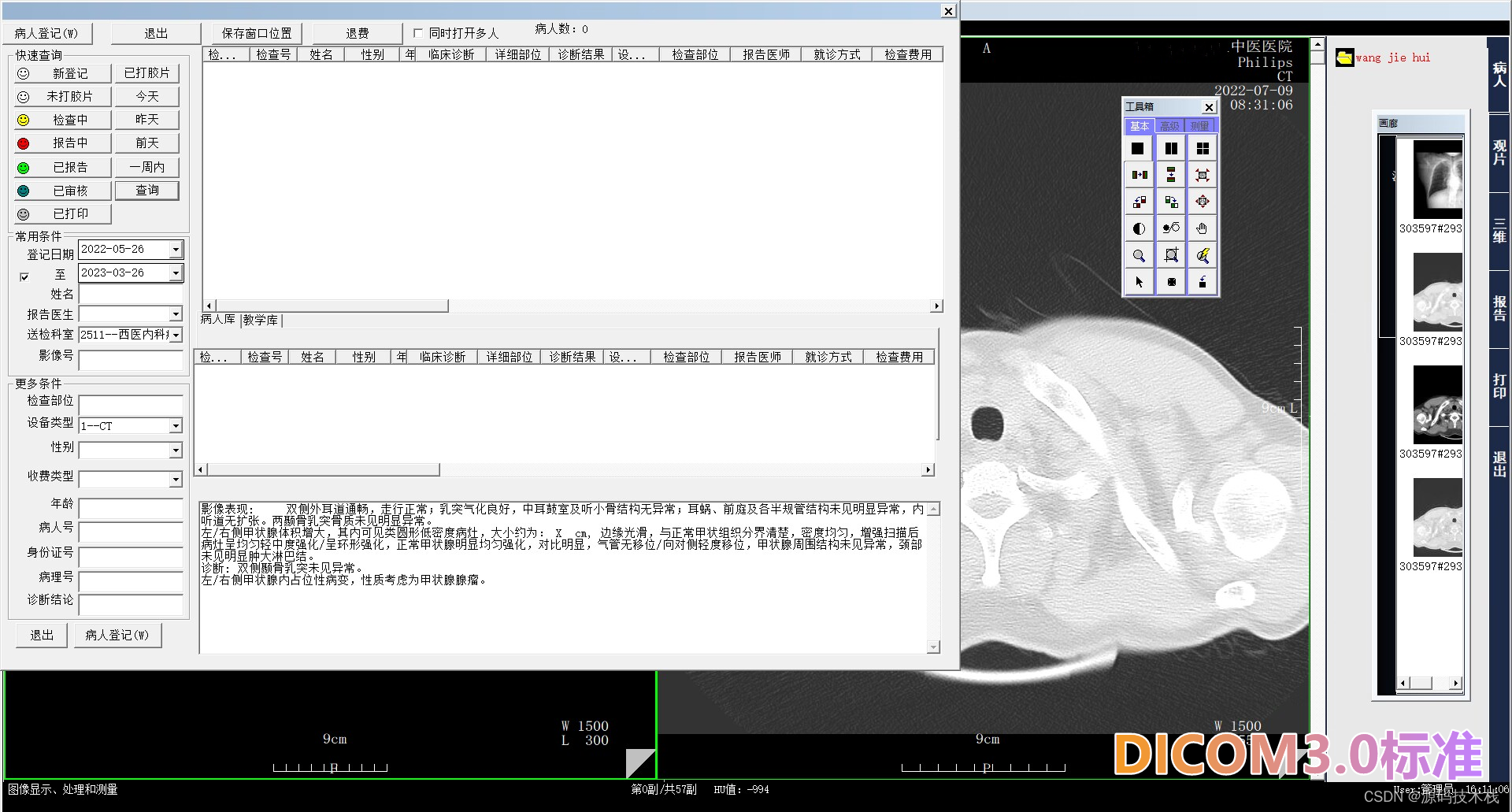
一、PACS是通过DICOM3.0国际标准接口,将CT、超声、放射检查(DR)、核磁、磁共振(MR)等多种医学影像以数字化的形式保存,提供授权方式查看和调回,并提供一些辅助诊断管理功能的系统。 二、PACS系统是HIS系统的重要组成部分ÿ…

Nerf论文前后介绍以及今后方向(2020年各个方向工作论文分析) NEURAL VOLUME RENDERING:NERF AND BEYOND
你好! 这里是“出门吃三碗饭”本人, 本文章接下来将介绍2020年对Nerf工作的一篇总结论文NEURAL VOLUME RENDERING:NERF AND BEYOND,论文作者是佐治亚理工学院的Frank Dellaert同学和 MIT的Lin Yen-Chen同学,非常感谢两位大佬的总结…
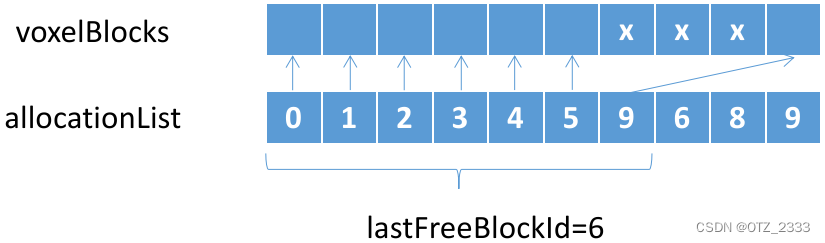
InfiniTAM v3中localVBA的使用原理
注意:以下是我对InfiniTAM v3代码的理解
初始化:假设预先设定的block数量长度为10,localVBA初始化后如下图 voxelBlocks的内存已经分配,但都是空的allocationList被初始化为allocationList[i]i,表示任意访问allocatio…

在DasViewer中两个不同的模型想要合并,系统提示导入失败(如图),应该怎样进行优化?
问题如图 是因为两个模型坐标系不一致,转换坐标系、进行统一坐标系后,可以一起在DasViewer中打开查看。
DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,也能流畅的加载较大…
ActiViz中的数据对象——vtkDataObject
文章目录 前言一、基本属性和方法二、派生类三、数据操作四、应用场景五、示例代码六、 总结前言
vtkDataObject是ActiViz中表示VTK数据对象的基类,它是实现数据存储、操作和可视化的核心组件之一。vtkDataObject提供了一种统一的数据模型,可以表示各种类型的数据,包括图像…
用模方软件进行模型的透明贴图,为什么翻出来透明部分是黑的?
答:透贴需要用PNG格式。
模方是一款针对实景三维模型的冗余碎片、水面残缺、道路不平、标牌破损、纹理拉伸模糊等共性问题研发的实景三维模型修复编辑软件。模方4.1新增自动单体化建模功能,支持一键自动提取房屋结构,平均1栋复杂建筑物只需3…
为什么模方崩过后重新新建工程打开会提示“OSG读取Node失败”?
为什么模方崩过后重新新建工程打开会提示“OSG读取Node失败”? 答:瓦块数据中可能有空文件或者不符合osgb组织结构的文件,可以检查移除。 模方是一款针对实景三维模型的冗余碎片、水面残缺、道路不平、标牌破损、纹理拉伸模糊等共性问题研发的…

【3D生成与重建】SSDNeRF:单阶段Diffusion NeRF的三维生成和重建
系列文章目录
题目:Single-Stage Diffusion NeRF: A Unified Approach to 3D Generation and Reconstruction 论文:https://arxiv.org/pdf/2304.06714.pdf 任务:无条件3D生成(如从噪音中,生成不同的车等)、…

计算机视觉之三维重建(6)---多视图几何(上)
文章目录 一、运动恢复结构问题(SfM)二、欧式结构恢复2.1 概述2.2 求解2.3 欧式结构恢复歧义 三、仿射结构恢复3.1 概述3.2 因式分解法3.3 总结3.4 仿射结构恢复歧义 一、运动恢复结构问题(SfM) 1. 运动恢复结构问题:通…
【三维生成】稀疏重建、Image-to-3D方法(汇总)
系列文章目录
总结一下近5年的三维生成算法,持续更新 文章目录 系列文章目录一、LRM:单图像的大模型重建(2023)摘要1.前言2.Method3.实验 二、SSDNeRF:单阶段Diffusion NeRF的三维生成和重建(ICCV 2023&am…
请问DasViewer是否支持与业务系统集成,将业务的动态的数据实时的展示到三维模型上?
答:一般这种是以平台的方式来展示,云端地球实景三维建模云平台是专门做这一块的,可前往云端地球官网免费使用。
DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,…
分享一个基于Multi-SLAM+3DGS的新一代三维内容生产技术
基于智能空间计算,新一代超逼真三维内容生成技术。 可自动化生成超逼真的大场景三维模型,并在各类终端和空间计算设备中,实现前所未有的沉浸式体验。 更可接入专业三维软件和应用平台,进行深度的模型开发与场景落地。 支持超大复杂…
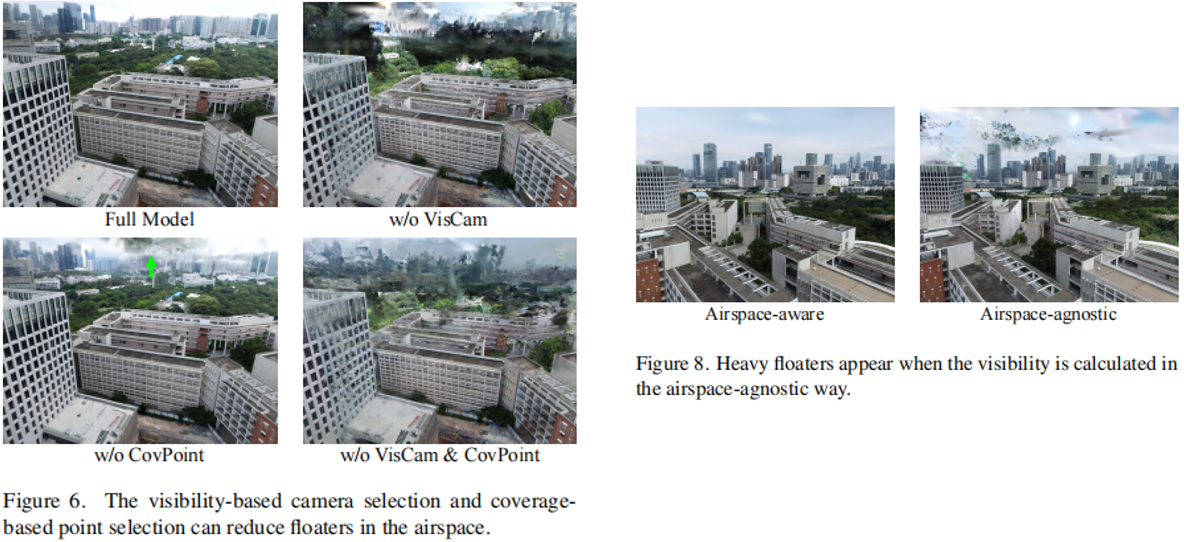
【三维重建】VastGaussian:用于大场景重建的大3D Gaussian(CVPR 2024)
题目:VastGaussian: Vast 3D Gaussians for Large Scene Reconstruction 来源:清华大学;华为诺亚;中国科学院 链接:https://vastgaussian.github.io/
总结:VastGaussian:基于3D GS的分块优化重…
重建大师跑图瓦片失败,一般是什么原因?
答:一般是边缘瓦块失败比较多的情况会出现,其他一些正常瓦块失败,重新提交基本上也都可以解决。
重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像…
Open3d 使用marching cubes生成3D模型
使用python 3.9.12
如果没有open3d pip install open3d 需要的头文件: import numpy as np
import torch
import open3d as o3d
from skimage import measure 通过open3d 导入数据 pointso3d.io.read_point_cloud(file) 创建体素网格,大小以最大最小X,…

【论文阅读】Neuralangelo:高保真神经表面重建
【论文阅读】Neuralangelo:高保真神经表面重建 Abstract1. Introduction2. Related work3. Approach3.1.预备工作3.2.数值梯度计算3.3.渐进细节层次3.4.优化 4. Experiments4.1. DTU Benchmark4.2. Tanks and Temples4.3.细节水平4.4.消融 5. Conclusion paper proj…
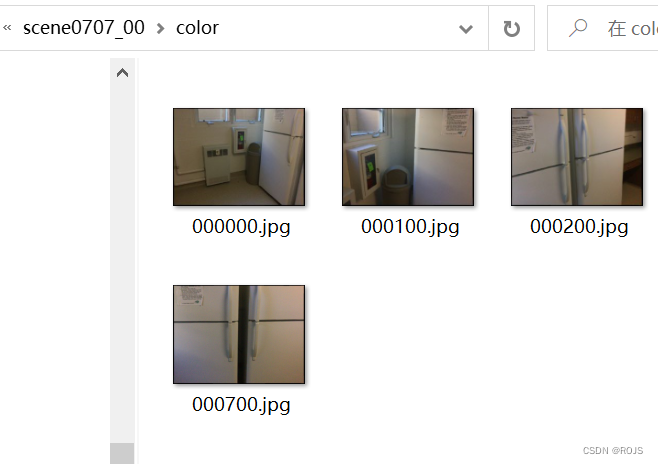
Scannet v2 数据集介绍以及子集下载展示
Scannet v2 数据集介绍以及子集下载展示 文章目录 Scannet v2 数据集介绍以及子集下载展示参考数据集简介子集scannet_frames_25kscannet_frames_test 下载脚本 download_scannetv2.py 参考 scannet数据集简介和下载-CSDN博客 scannet v2 数据集下载_scannetv2数据集_蓝羽飞鸟的…

LOD1.3快速构建 | 多源数据自动化作业、图元和体块模型快速编辑、智能纹理贴图...
2023年,自然资源部先后发布了《实景三维中国建设总体实施方案(2023—2025年)》、《实景三维中国建设城市三维模型快速构建技术规定(征求意见稿)》等文件,明确提出,2024年底完成城市三维模型&…
使用dasviewer加载osgb模型,不显示纹理,黑乎乎的怎么解决?
答:查看一下是不是点到快捷键切换成无纹理模式了。 DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,也能流畅的加载较大规模实景三维模型,提供方便快捷的数据浏览操作。#DasViewer##实景…
世界坐标系投影到像素坐标系【python实验】
对于三维视觉而言,需要清晰了解世界坐标系和像素坐标系的对应关系。本文用python做实验。 相机内外参数的数学推导可以看我之前的博客《【AI数学】相机成像之内参数 》,《【AI数学】相机成像之外参数》。 实验开始 首先明确相机的内外参数:
…

大势鹰眼纵横股份:应急现场实时三维建模解决方案及应用
近年来,我国自然灾害处于多发、频发的分布态势,极易出现事发区域断路、断网、断电(后简称“三断”)等极端且突发情形,从而严重影响现场应急指挥决策与救援实施工作的开展。无人机以其灵活机动、操控方便、传感器丰富等…

山西省文物局与大势智慧签订战略合作协议
8月24日,由山西省文物局、中国文物信息咨询中心(国家文物局数据中心)主办的数字文博发展论坛在太原举行。武汉大势智慧科技有限公司(后简称“大势智慧”)受邀参与,与来自国内文博数字化领域的专家学者齐聚一堂,围绕“数…
PACS源码,医学影像传输系统源码,全院级应用,支持放射、超声、内窥镜、病理等影像科室,且具备多种图像处理及三维重建功能
三维智能PACS系统源码,医学影像采集传输系统源码 PACS系统以大型关系型数据库作为数据和图像的存储管理工具,以医疗影像的采集、传输、存储和诊断为核心,集影像采集传输与存储管理、影像诊断查询与报告管理、综合信息管理等综合应用于一体的…

【三维重建】3D Gaussian Splatting:实时的神经场渲染
文章目录 摘要一、前言二、相关工作1.传统的场景重建与渲染2.神经渲染和辐射场3.基于点的渲染和辐射场4.*什么是 Tile-based rasterizer (快速光栅化) 三、OVERVIEW四、可微的三维高斯 Splatting五、三维高斯 自适应密度控制的优化1.优化2.高斯的自适应控制 六、高斯分布的快速…

编译运行windows+OpenMVG+OpenMVS+vs2017
安装vcpkg过程需要翻墙!!!
github下载代码
git clone https://github.com/microsoft/vcpkg
git clone https://github.com/cdcseacave/VCG.git
git clone https://github.com/cdcseacave/openMVS.git src安装vcpkg包
cd .\vcpkg
.\bootstr…
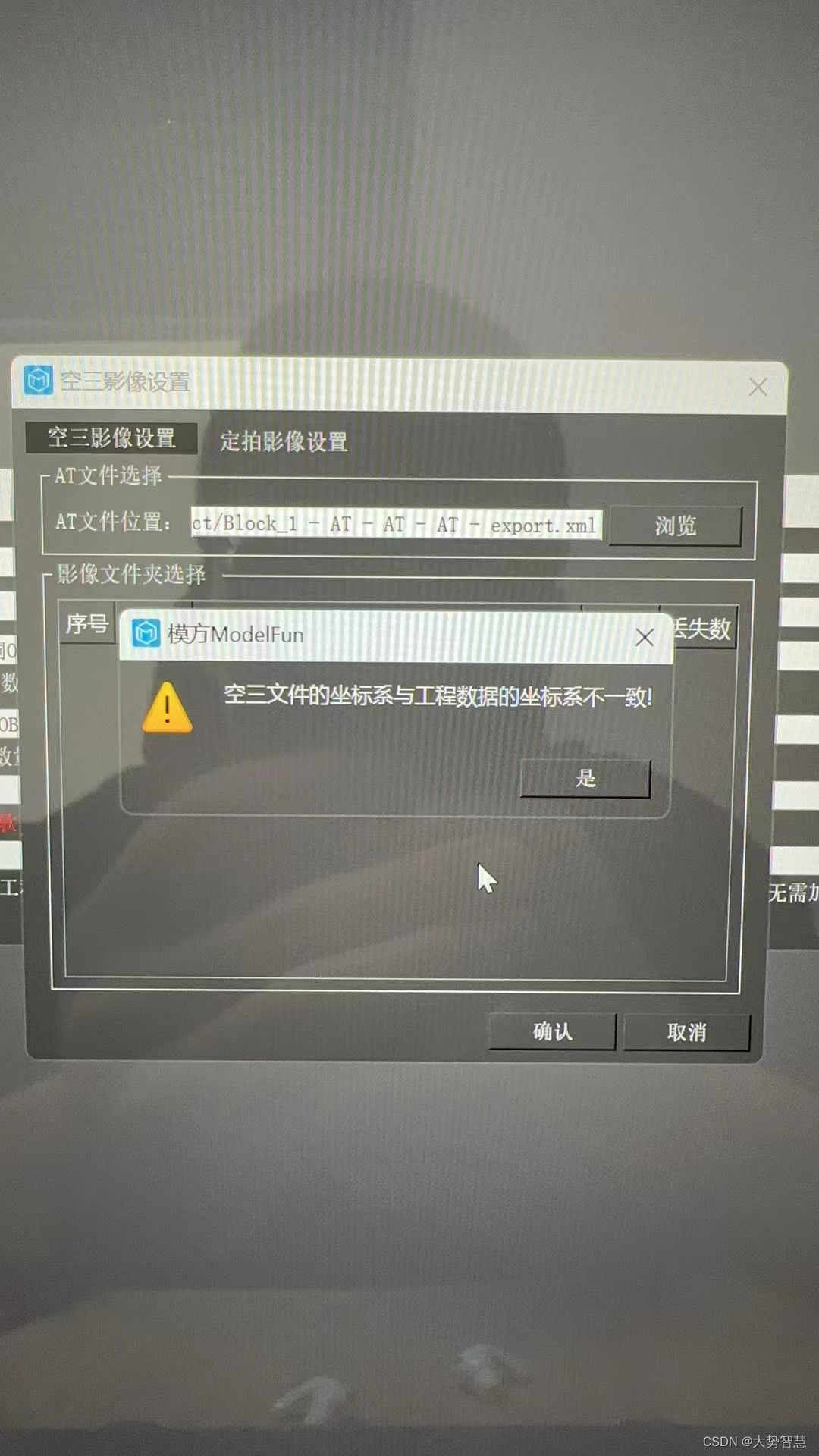
模方新建工程时,显示空三与模型坐标系不一致怎么解决
答:检查空三xml与模型的metadata.xml的坐标系是否一致,metadata文件是否有在data目录外面。 模方是一款针对实景三维模型的冗余碎片、水面残缺、道路不平、标牌破损、纹理拉伸模糊等共性问题研发的实景三维模型修复编辑软件。模方4.0新增单体化建模模块,…

三维人脸实践:基于Face3D的渲染、生成与重构 <二>
face3d: Python tools for processing 3D face
git code: https://github.com/yfeng95/face3d paper list: PaperWithCode
3DMM方法,基于平均人脸模型,可广泛用于基于关键点的人脸生成、位姿检测以及渲染等,能够快速实现人脸建模与渲染。推…
工程(十七)——自己数据集跑R2live
博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。
r2live是比较早的算法,编译过程有很多问题,通过以下两个博客可以解决
编译R2LIVE问题&解决方法-CSDN博客
r2live process has died 问题解决了_required process …
【三维重建-PatchMatchNet复现笔记】
【三维重建-PatchMatchNet复现笔记】 1 突出贡献2 数据集描述3 训练PatchMatchNet3.1 输入参数3.2 制定数据集加载方式 1 突出贡献 在计算机GPU和运行时间受限的情况下,PatchMatchNet测试DTU数据集能以较低GPU内存和较低运行时间,整体误差位列中等&#…

乘势“2”上 双影来袭 | 距大势智慧2023秋季新品发布会还有2天!
乘势“2”上 双影来袭
全国产、真安全 大势智慧2023秋季新品发布会
倒计时2天
10.27 | 14:30 一键扫码预约
#实景三维##三维重建##实景三维中国##国产替代##新品发布#
ubuntu20.04 nerf Instant-ngp
Instant-ngp linux ubuntu 20.04 GPU RTX3050Ti
Instant-ngp官方文档地址
https://github.com/NVlabs/instant-ngp
参考链接Instant-ngp linux部署及使用 - 简书
Ubuntu20.04复现instant-ngp,自建数据集,导出mesh_XINYU W的博客-CSDN博客 步骤 安装基…
基于摄影测量的三维重建【终极指南】
我们生活的时代非常令人兴奋,如果你对 3D 东西感兴趣,更是如此。 我们有能力使用任何相机,从感兴趣的物体中捕捉一些图像数据,并在眨眼间将它们变成 3D 资产! 这种通过简单的数据采集阶段进行的 3D 重建过程是许多行业…

NeRF算法模型简析:从理论到实践的轻度解析以及如何编辑和微调
nerf模型可编辑的? NeRF模型的可编辑性(editability)指的是能够修改预训练的NeRF模型以改变其生成的场景或对象的某些特征,而不是从头开始重新训练模型。这种编辑可以是改变颜色、形状、纹理或者添加、移除和修改场景中的对象。 在…

模方匀色全部失败,报错代码-5838,是什么原因?
答:报错提示osgb输出路径不存在,可以更换一下输出路径;如果是集群方式导出,则要求输出路径是网络路径所有节点均可访问;
检查路径没有问题,排查是大疆数据的兼容性问题,后面单独用切割好的osgb…
生成模型 | 三维重建(3D reconstruction)调研及总结【20231219更新版】
本文是关于三维重建的论文调研,主要集中于基于图片到3d的模型,其中期刊会议标志如下:
[🤖 ICCV 2023 ] 1.3D综述系列
2019_Image-based 3D Object Reconstruction: State-of-the-Art and Trends in the Deep Learning Era 论文地…
PACS三维医学影像处理系统源码
三维医学图像处理系统(PACS)源码
系统概述:
影像归档和通信系统PACS集影像存储服务器、影像诊断工作站及RIS报告系统于一身,主要有图像处理模块、影像数据管理模块、RIS报告模块、光盘存档模块、DICOM通讯模块、胶片打印输出等模块组成&…
【3D reconstruction 学习笔记】
三维重建 3D reconstruction 1. 相机几何针孔相机摄像机几何 2. 相机标定线性方程组的解齐次线性方程组的解非线性方程组的最小二乘解透镜相机标定带畸变的相机标定 3. 单视图重建2D平面上的变换3D空间上的变换单视测量无穷远点 无穷远线 无穷远平面影消点 影消线单视重构 4. 三…
3DTile是不是没有坐标的选择?
可参考以下内容:
一、坐标参考系统(CRS)
3D Tiles 使用右手笛卡尔坐标系;也就是说,x和y的叉积产生z。3D Tiles 将z轴定义为局部笛卡尔坐标系的向上。tileset的全局坐标系通常位于WGS 84地心固定(ECEF)参考系(EPSG4978)中,但它不是必须的&am…
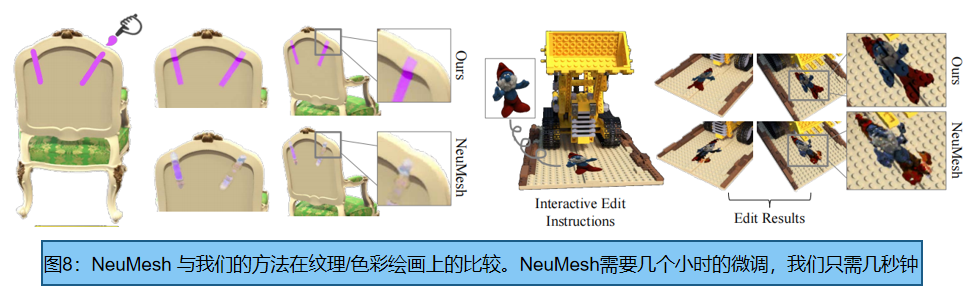
【三维编辑】Seal-3D:基于NeRF的交互式像素级编辑
文章目录 摘要一、引言二、方法2.1.基于nerf的编辑问题概述2.2.编辑指导生成2.3.即时预览的两阶段学生训练 三、实验总结 项目主页: https://windingwind.github.io/seal-3d/ 代码:https://github.com/windingwind/seal-3d/ 论文: https://arxiv.org/pdf/2307.15131…

三维重建_使用OpenMVG/OpenMVS重建场景
目录
1. 安装环境
1.1 安装OpenMVS
1.2 安装OpenMVG
2. 测试
2.1 下载数据
2.2 进行三维重建
2.2.1 OpenMVG提取稀疏点云
2.2.2 OpenMVS稠密化点云/网格化/纹理贴图
3. 运行遇到问题记录
4. 参考 1. 安装环境
本地环境: Ubuntu20.04 没有cuda
1.1 安装O…

三角化:Triangulation: Why Optimize?
三角化:Triangulation: Why Optimize? 1. 预备知识1.1 评估 3D 点准确性 2. 提出的方法2.1 广义加权中点法2.2 可选的中点法2.3 Cheirality(多视图几何中代表着3D点的正景深约束)2.4 逆深度加权中点-Inverse Depth Weighted(IDW) Midpoint 3. 实现代码 Reference: …
大势山维 | 全盘自主可控的实景三维中国建设解决方案
实景三维中国建设是面向新时期测绘地理信息事业服务于社会经济建设和生态文明建设的新定位、新需求。多年来,大势智慧与山维科技深耕数字化建设,以技术研发为立身之本,逐步成长为空间地理信息建设领域的领跑企业。
大势智慧围绕三维重建国产…
PACS医学影像系统(完整版)
一、PACS影像存取与传输系统以实现医学影像数字化存储、诊断为核心任务,从医学影像设备(如CT、CR、DR、MR、DSA、RF等)获取影像,集中存储、综合管理医学影像及病人相关信息,建立数字化工作流程。 二、系统可实现检查预…
【论文精读】MVSNet系列(2018-2022)总结
MVSNet系列总结1.MVSNet ECCV20182.RMVSNet CVPR20193.P-MVSNet ICCV20194.MVSCRF ICCV20195.PointMVSNet ICCV20192019年的这四篇文章各有特点,其中RMVSNet、PointMVSNet更是打开了可以继续沿着往下做的思路:6.cascade MVSNet CVPR20207.UCSNet CVPR202…
PACS医学影像报告管理系统源码带CT三维后处理技术
PACS从各种医学影像检查设备中获取、存储、处理影像数据,传输到体检信息系统中,生成图文并茂的体检报告,满足体检中心高水准、高效率影像处理的需要。 自主知识产权:拥有完整知识产权,能够同其他模块无缝对接
国际标准…

用cmake在win10配置colmap
目录写在前面1、直接使用colmap2、自己编译准备tipsqtCGALcerescolmapvisual studio参考及感谢完写在前面
1、直接使用colmap
如果是想直接是使用colmap windows版本,可直接在github下载: https://github.com/colmap/colmap/releases 最上面的版本是最…
Nvblox ROS1 安装配置
安装并配置Nvblox ROS1
下载Nvblox ROS1
mkdir -p ~/nvblox_ros1_ws/src/
mkdir ~/data
cd ~/nvblox_ros1_ws/src/
git clone https://github.com/ethz-asl/nvblox_ros1.git
cd nvblox_ros1
git submodule update --init --recursive安装Docker
for pkg in docker.io docke…

第十六届中国智慧城市大会 | 国产化三维重建技术服务智慧城市建设
2023年10月13日,由武汉大势智慧科技有限公司、飞燕航空遥感技术有限公司主办的第十六届智慧城市大会-实景三维技术创新与应用论坛在广州成功举办。
来自实景三维、自然资源、数字孪生、AI大数据、航空遥感等多个领域的专家,深度分享各自的智慧城市建设经…
C++医院影像科PACS源码:三维重建、检查预约、胶片打印、图像处理、测量分析等
PACS连接DICOM接口的医疗器械(如CT、MRI、CR、DR、DSA、各种窥镜成像系统设备等),实现图像无损传输,实现DICOM胶片打印机回传打印功能,支持各种图像处理,可以进行窗技术调节,与登记台管理系统共…
网格大师如何把b3dm转为osgb格式?
答:在网格大师的倾斜数据处理工具中选中“3DTiles转OSGB”,设定数据输入路径和输出路径提交任务即可。 网格大师是一款能够解决实景三维模型空间参考、原点、瓦块大小不统一,重叠区域处理问题的工具“百宝箱”,集格式转换、坐标转…

重建大师提交空三后引擎状态是等待,怎么开启?
答:图片中这是在自由网空三阶段,整个AT都是等待中,可以修改任务目录和监控目录看一下,先设置引擎,再提交空三。
CT MR 三维重建可视化系统
前言
本文通过研究医学可视化的不同算法,在 vc环境下,以可视化软件包VTK 为平台,编程设计实现了三维建模系统,实现了 DICOM图像的三维重建。 材料与方法 使用符合 DICOM 标准的临床 CT、MRI图像数据,在 vc环境下&…

大势智慧荣获2023光合组织解决方案大赛人工智能赛道标杆奖及争先奖!
近日,2023年第三届光合组织解决方案大赛获奖名单正式公布。大势智慧以基于国产化平台的实景三维全流程解决方案,突破层层选拔,最终荣获“集智计划”(人工智能赛道)标杆奖及争先奖。
实景三维是我国的数字基础设施&…
大势浏览器DasViewer里面的查询和选择功能,如何实现与矢量数据关联?
答:矢量数据目前得是大势这边软件生产的才可以进行关联。
DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,也能流畅的加载较大规模实景三维模型,提供方便快捷的数据浏览操作。
重建大师如何调用GPU?
答:会调用GPU的cuda和显存,不同处理的阶段,占用会不一样。 重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像控点,输出高精度彩色网格模…
PatchMatchNet笔记
PatchMatchNet笔记 1 概述2 PatchmatchNet网络结构图2.1 多尺度特征提取2.2 基于学习的补丁匹配 3 性能评价 PatchmatchNet: Learned Multi-View Patchmatch Stereo:基于学习的多视角补丁匹配立体算法
1 概述
特点 高速,低内存,可以处理…

计算机视觉之三维重建(1)---摄像机几何
文章目录 一、针孔模型和透镜1.1 针孔摄像机1.2 近轴折射模型1.3 透镜问题 二、摄像机几何2.1 像平面和像素平面2.2 齐次坐标下的投影变换2.3 摄像机倾斜2.4 规范化摄像机2.5 世界坐标系2.6 Faugeras定理2.7 投影变换性质: 三、其他投影摄像机模型3.1 弱透视投影摄像…

医院信息化、数字医学影像、DICOM、PACS源码
PACS系统适合卫生院、民营医院、二甲或以下公立医院的放射科、超声科使用。功能强大且简洁,性能优异,具备MPR(三维重建)、VR(容积重建)、胶片打印功能,能够快速部署。 PACS系统支持DR、CT、磁共…
医学影像信息(PACS)系统软件源码
PACS系统是PictureArchivingandCommunicationSystems的缩写,与临床信息系统(ClinicalInformationSystem,CIS)、放射学信息系统(RadiologyInformationSystem,RIS)、医院信息系统(HospitalInformationSystem,HIS)、实验室信息系统(L…

【立体视觉(五)】之立体匹配与SGM算法
【立体视觉(五)】之立体匹配与SGM算法 一、立体匹配一)基本步骤二)局部立体匹配三)全局立体匹配四)评价标准1. 均方误差(RMS)2. 错误匹配率百分比(PBM) 二、半全局(SGM)立体匹配一)代价计算二&a…